
|
2DoF
|
3DoF
|
4DoF
|
5DoF
|
6DoF
|
|
|
DuoPod
|
|||||
|
DELTA
|
|||||
|
ARTICULATED
|

.jpg)
.jpg)
.jpg)
Available products: 0

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 15 | 33.1 |
| Working area-reach [mm|in]: | 1682 | 66.2 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
|
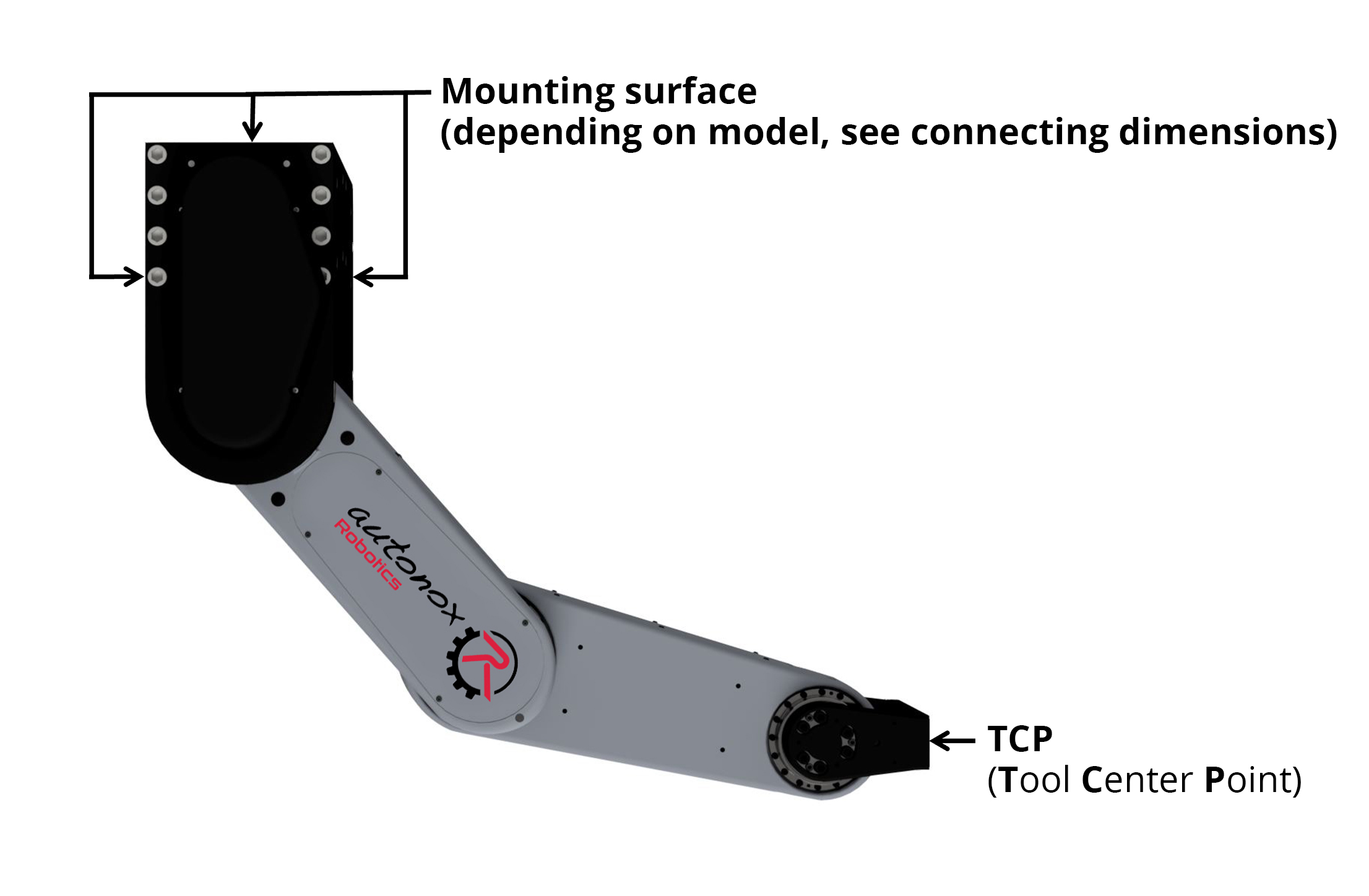
This robot mechanics is characterized by the hollow axes 4 and 6. The large boreholes allow media supplies for end effectors. No installation need of motor and encoder cables for axes 5 and 6 as spirals around the fourth axis. Service life is significant increased.
|
|
Article number: AT_00026-01

| Field of application: | CNC Robotics, Standard (not hygienic), Precision |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 1665 | 65.6 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
|
Lower base frame than the standard (compact, rigid, inexpensive). This robot mechanics was developed for applications that demand high rigidity, good vibration damping and maximum precision. It is sealed against abrasive dusts, liquids, etc. and can be pressurized with sealing air.
|
|
Article number: AT_00026

| Field of application: | CNC Robotics, Standard (not hygienic), Precision |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 1665 | 65.6 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
|
This robot mechanics was developed for applications that demand high rigidity, good vibration damping and maximum precision. It is sealed against abrasive dusts, liquids, etc. and can be pressurized with sealing air.
|
|
Article number: AT_00016.01

| Field of application: | CNC Robotics, Standard (not hygienic), Precision |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 150 | 330.7 |
| Working area-reach [mm|in]: | 2390 | 94.1 |
| Mounting position: | Floor, Ceiling |
|
Developed for applications that demand high rigidity, good vibration damping and maximum precision. Sealed against abrasive dusts, liquids, etc. Can be pressurized with sealing air.
|
|
Article number: AT_00035.01

| Field of application: | CNC Robotics, Standard (not hygienic), Precision |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 90 | 198.4 |
| Working area-reach [mm|in]: | 2838 | 111.7 |
| Mounting position: | Floor, Ceiling |
|
This robot mechanics was developed for applications that demand high rigidity, good vibration damping and maximum precision. It is sealed against abrasive dusts, liquids, etc. and can be pressurized with sealing air.
|
|

| Field of application: | Standard (not hygienic), Surface processing |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 20 | 44.1 |
| Working area-reach [mm|in]: | 1720 | 67.7 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
|
Specially developed for grinding, polishing, and deburring applications. Characterized by an offset wrist (angled hand). Compact, lightweight design with a slim and rigid arm construction. Hand is sealed against abrasive dust and liquids.Please note that this robot mechanics is based on a different kinematic model than a standard central wrist. Please discuss this with your control partner.
|
|

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 60 | 132.3 |
| Working area-reach [mm|in]: | 1959 | 77.1 |
| Mounting position: | Floor, Ceiling |
|
Increased precision through the use of a reinforced gearbox between the base frame and rotating column (axis 1) with increased torque, increased tilting rigidity and reduced backlash
|
|

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 45 | 99.2 |
| Working area-reach [mm|in]: | 2118 | 83.4 |
| Mounting position: | Floor, Ceiling |
|
Increased precision through the use of a reinforced gearbox between the base frame and rotating column (axis 1) with increased torque, increased tilting rigidity and reduced backlash
|
|

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 2257 | 88.9 |
| Mounting position: | Floor, Ceiling |
|
Increased precision through the use of a reinforced gearbox between the base frame and rotating column (axis 1) with increased torque, increased tilting rigidity and reduced backlash
|
|
Article number: AT_00017

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 15 | 33.1 |
| Working area-reach [mm|in]: | 1015 | 40.0 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_00003

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 1035 | 40.7 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_30025

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 8 | 17.6 |
| Working area-reach [mm|in]: | 1155 | 45.5 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_30005

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 60 | 132.3 |
| Working area-reach [mm|in]: | 1646 | 64.8 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_30010

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 45 | 99.2 |
| Working area-reach [mm|in]: | 1804 | 71.0 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_30006

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 1943 | 76.5 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_40005

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 2 |
| Nominal payload [kg|lbs]: | 60 | 132.3 |
| Working area-reach [mm|in]: | 1681 | 66.2 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_40010

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 2 |
| Nominal payload [kg|lbs]: | 45 | 99.2 |
| Working area-reach [mm|in]: | 1839 | 72.4 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
Article number: AT_40006

| Field of application: | Standard (not hygienic) |
| Translatory Degrees of Freedom (X,Y,Z): | 2 |
| Rotational Degrees of Freedom (α,ß,γ): | 2 |
| Nominal payload [kg|lbs]: | 30 | 66.1 |
| Working area-reach [mm|in]: | 1978 | 77.9 |
| Mounting position: | Floor, Ceiling, Wall, Angle |
No suitable mechanics found?
Our robot design is based on modular construction. By standardizing our design and documentation processes, we have the ability to very quickly add new mechanics to our portfolio based on existing ones.
Get in touch with us!