
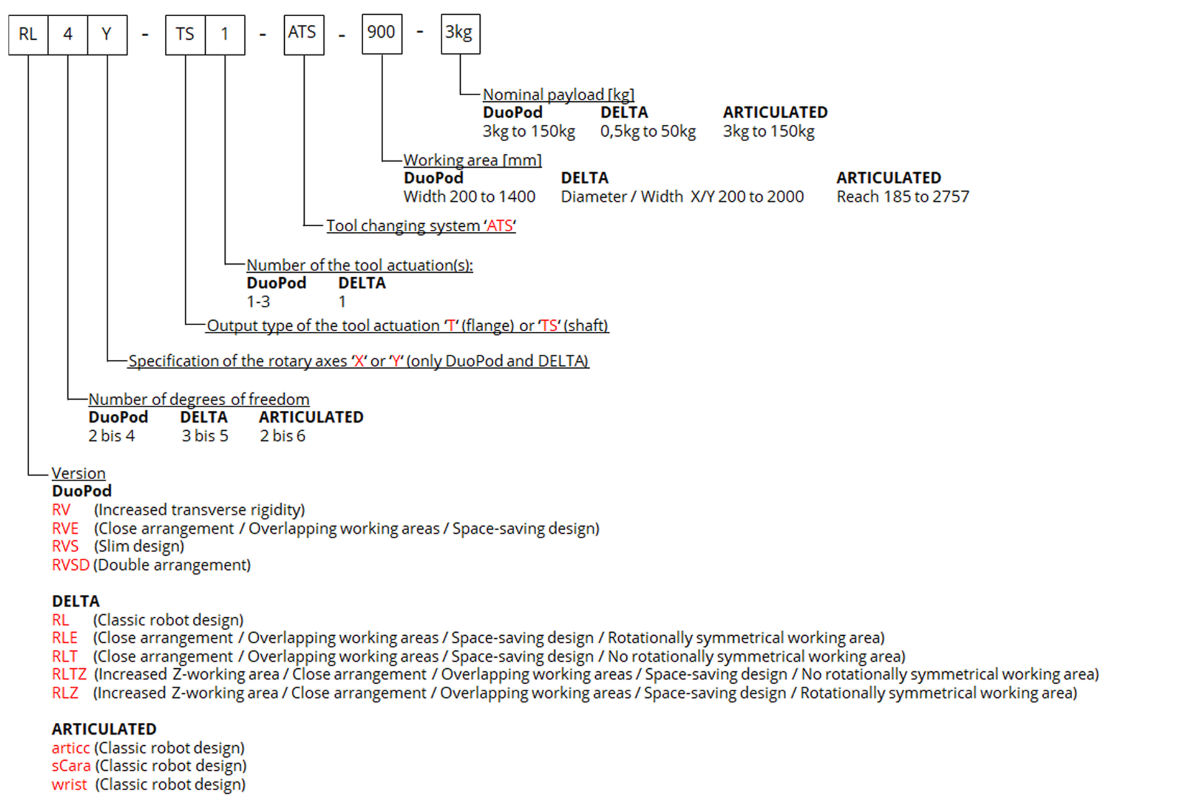

HHD DELTA RL4-1600-12kg
Article number:
A_00853
Delivery time: on request
Description
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational and one (1) rotational degree(s) of freedom.
Scope of delivery
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational and one (1) rotational degree(s) of freedom.
Scope of delivery
- Robot mechanics incl. gearbox
- Servo motor adapter
- Transport and packing instructions
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
-
Signed in / logged in you will receive further documents:
With the download you accept the general terms of sale and supply, privacy policy and terms of use.
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
| Gearbox article numbers for this robot mechanics | ||
|---|---|---|
| Function | Article number | Document |
| Drive of the upper arms | MT_WST00105111-xx-FO | Operating manual gearbox type 3 (PDF) |
| Drive of the telescopic shaft for rotation γ around Z | MT_WST00105131-xx-FO | Operating manual gearbox type 3 (PDF) |
| Field of application: | Hygienic ′HHD′ |
|---|---|
| Kinematics: | Parallel |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 12 | 26.5 |
| Working area-diameter [mm|in]: | 1600 | 63.0 |
| Working height outside [mm|in]: | 325 | 12.8 |
| Working height center [mm|in]: | 541 | 21.3 |
| Max. acceleration torque of the rotation γ around Z at the output [Nm|in.lbs]: | 110 | 973.6 |
| Nominal torque of the rotation γ around Z at the output [Nm|in.lbs]: | 110 | 973.6 |
| Max. speed of the rotation γ around Z at the output [1/min]: | 260 |
| Nominal speed of the rotation γ around Z at the output [1/min]: | 160 |
| Bearing type of the telescopic shaft(s): | Roller bearing |
| Bearing type of the arm joints: | Roller bearing |
| Lubricants of the bearings: | Food-grade (FO) |
| Lubricants of the gearboxes: | Food-grade (FO) |
| Cleaning: | Up to 28 bar | 406 psi high pressure |
| Protection class: | IP69K |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Ceiling, Wall (on request), Angle (on request) |
| Robot weight without drive engineering (esp. drive) [kg|lbs]: | 132 | 291 |
| Special features: | With stainless steel gearboxes (food-grade lubricants, but therefore reduced performance). |
Article number: MT_BGR00106855

Description
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
 Scope of delivery
Scope of delivery
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
Article number: MT_BGR00107602

Description
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
 Scope of delivery
Scope of delivery
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
Article number: VK_00062

Description
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
 Scope of delivery
Scope of delivery
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
- Carrier box incl. assembling/transport aid
- Gearbox locks
Description and scope of delivery
Description
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational and one (1) rotational degree(s) of freedom.
Scope of delivery
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational and one (1) rotational degree(s) of freedom.
Scope of delivery
- Robot mechanics incl. gearbox
- Servo motor adapter
- Transport and packing instructions
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
Technical specifications
| Field of application: | Hygienic ′HHD′ |
|---|---|
| Kinematics: | Parallel |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 12 | 26.5 |
| Working area-diameter [mm|in]: | 1600 | 63.0 |
| Working height outside [mm|in]: | 325 | 12.8 |
| Working height center [mm|in]: | 541 | 21.3 |
| Max. acceleration torque of the rotation γ around Z at the output [Nm|in.lbs]: | 110 | 973.6 |
| Nominal torque of the rotation γ around Z at the output [Nm|in.lbs]: | 110 | 973.6 |
| Max. speed of the rotation γ around Z at the output [1/min]: | 260 |
| Nominal speed of the rotation γ around Z at the output [1/min]: | 160 |
| Bearing type of the telescopic shaft(s): | Roller bearing |
| Bearing type of the arm joints: | Roller bearing |
| Lubricants of the bearings: | Food-grade (FO) |
| Lubricants of the gearboxes: | Food-grade (FO) |
| Cleaning: | Up to 28 bar | 406 psi high pressure |
| Protection class: | IP69K |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Ceiling, Wall (on request), Angle (on request) |
| Robot weight without drive engineering (esp. drive) [kg|lbs]: | 132 | 291 |
| Special features: | With stainless steel gearboxes (food-grade lubricants, but therefore reduced performance). |
Download area
-
Signed in / logged in you will receive further documents:
With the download you accept the general terms of sale and supply, privacy policy and terms of use.
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
| Gearbox article numbers for this robot mechanics | ||
|---|---|---|
| Function | Article number | Document |
| Drive of the upper arms | MT_WST00105111-xx-FO | Operating manual gearbox type 3 (PDF) |
| Drive of the telescopic shaft for rotation γ around Z | MT_WST00105131-xx-FO | Operating manual gearbox type 3 (PDF) |
Accessories
Article number: MT_BGR00106855
Description
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
Scope of delivery
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
Article number: MT_BGR00107602
Description
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
Scope of delivery
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
Article number: VK_00062
Description
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
Scope of delivery
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
- Carrier box incl. assembling/transport aid
- Gearbox locks