


ARTICULATED articc6-2128-45kg
Delivery time: max. 22-24 weeks after order confirmation (For larger quantities please contact us. The delivery time specification also applies to spare parts.); For patent law reasons not available and usable in the USA!
This type of robot is based on the principle of serial kinematics.
All drives and motor cables are moved along. The robot has three (3) translational and three (3) rotational degrees of freedom.
Highlight
The use of secondary-encoders is prepared for axes 1-6.
This robot mechanics was developed for applications that require maximum precision.
Legal notice
For patent law reasons not available and usable in the USA!
Scope of delivery
- Robot mechanics incl. gearbox
- Mounting adapter for secondary-encoders
- Installation of drive technology and the secondary-encoders (to be provided free of charge in each case)
- Multi-hour, logged test run as final quality inspection
- Threaded protection caps
- Transport and packing instructions
Required accessories
- Set of parts for installing the drive technology. This set consists of, for example, a servo motor adapter, servo motor cable, transmission input pinion, plug board (usually on the base frame).
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
-
Signed in / logged in you will receive further documents:
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
| Field of application: | Standard (not hygienic), CNC Robotics |
|---|---|
| Kinematics: | Serial |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 45 | 99.2 |
| Supplementary load on the rotating column [kg|lbs]: | 70 | 154.3 |
| Supplementary load on the arm [kg|lbs]: | 40 | 88.2 |
| Working area-reach [mm|in]: | 2128 | 83.8 |
| Lubricants of the bearings: | Synthetic |
| Lubricants of the gearboxes: | Synthetic |
| Cleaning: | No high pressure |
| Protection class: | IP64 |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Floor, Ceiling |
| Special features: | The use of secondary encoders is prepared for axes 1-6. |

Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | AM8071-3SH1-1001 |
| M2 | AM8071-3SH1-1001 |
| M3 | AM8061-3KH1-1001 |
| M4 | AM8042-3FH1-1001 |
| M5 | AM8042-3FH1-1001 |
| M6 | AM8042-3FH1-1001 |
Suitable motors must be provided by the customer to autonox for assembly free of charge.
Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | MS2N07-D0BNN-CMUL2-NNNNN-NN |
| M2 | MS2N07-D0BNN-CMUL2-NNNNN-NN |
| M3 | MS2N06-D0BRN-CMUL2-NNNNN-NN |
| M4 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
| M5 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
| M6 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
Suitable motors must be provided by the customer to autonox for assembly free of charge.
Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | 1FK2208-5AC10-1MB0 |
| M2 | 1FK2208-5AC10-1MB0 |
| M3 | 1FK2206-4AF10-1MB0 |
| M4 | 1FK7043-4CH71-1CB0-Z N05 |
| M5 | 1FK2104-5AF10-1MB0 |
| M6 | 1FK2104-5AF10-2MB0 |
Suitable motors must be provided by the customer to autonox for assembly free of charge.

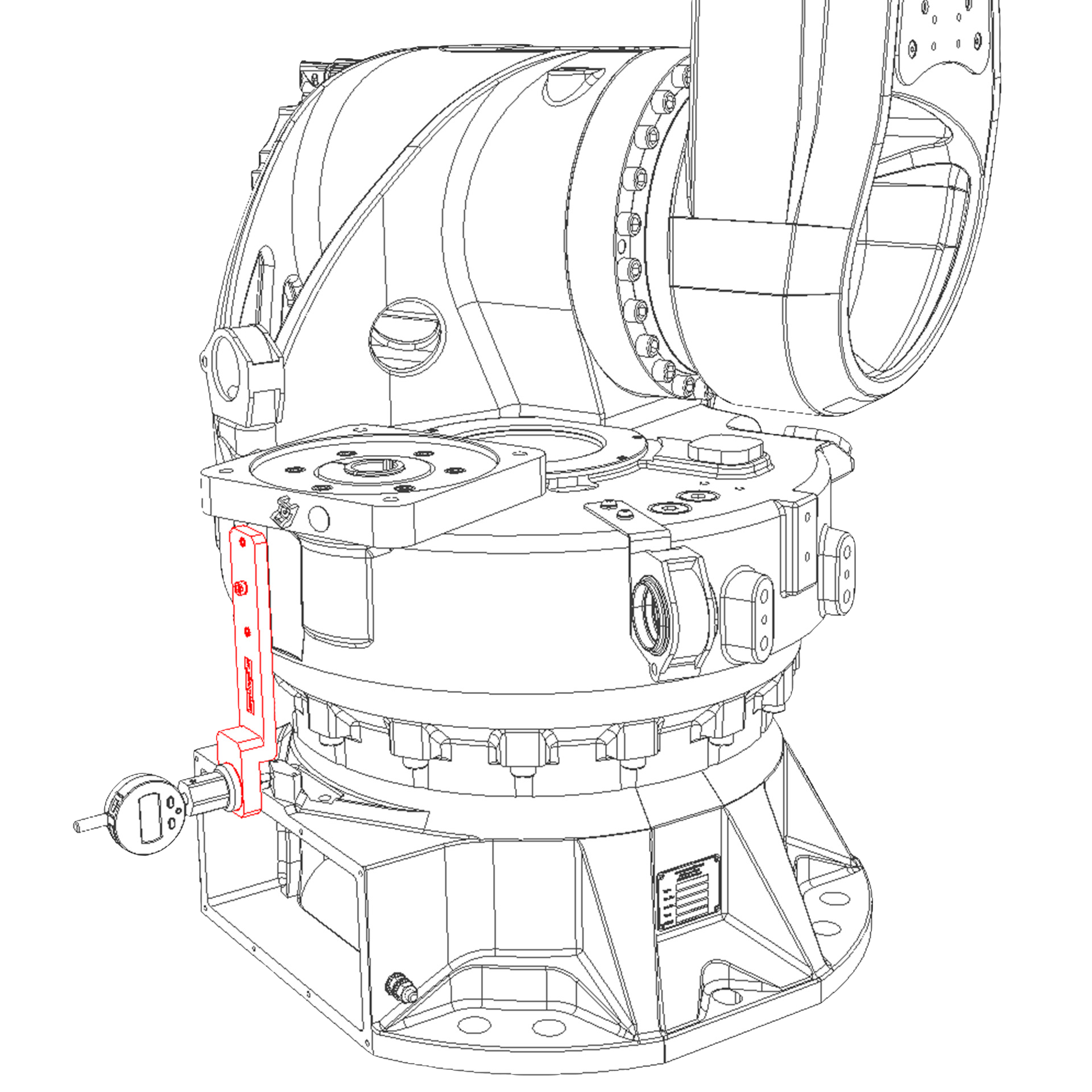
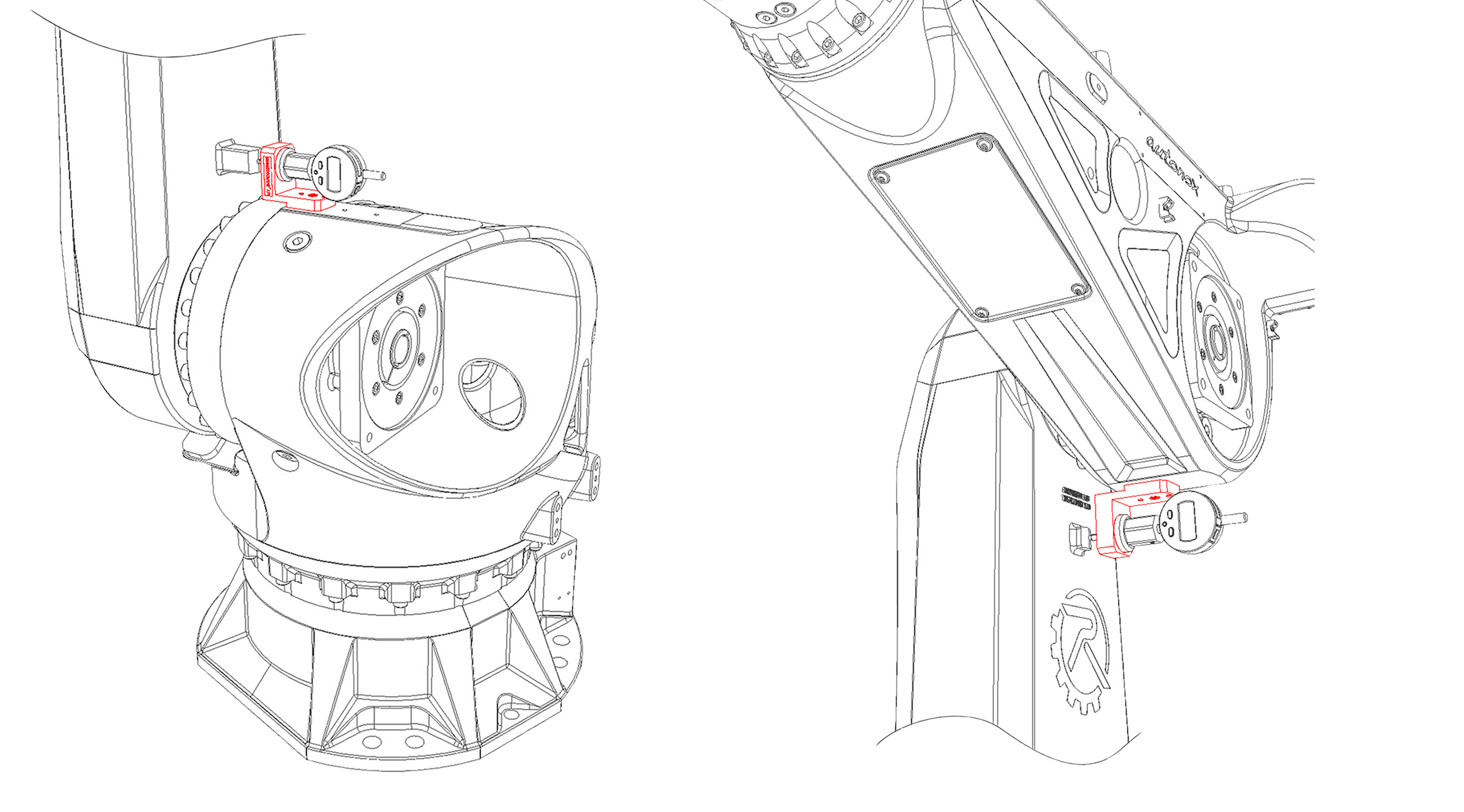
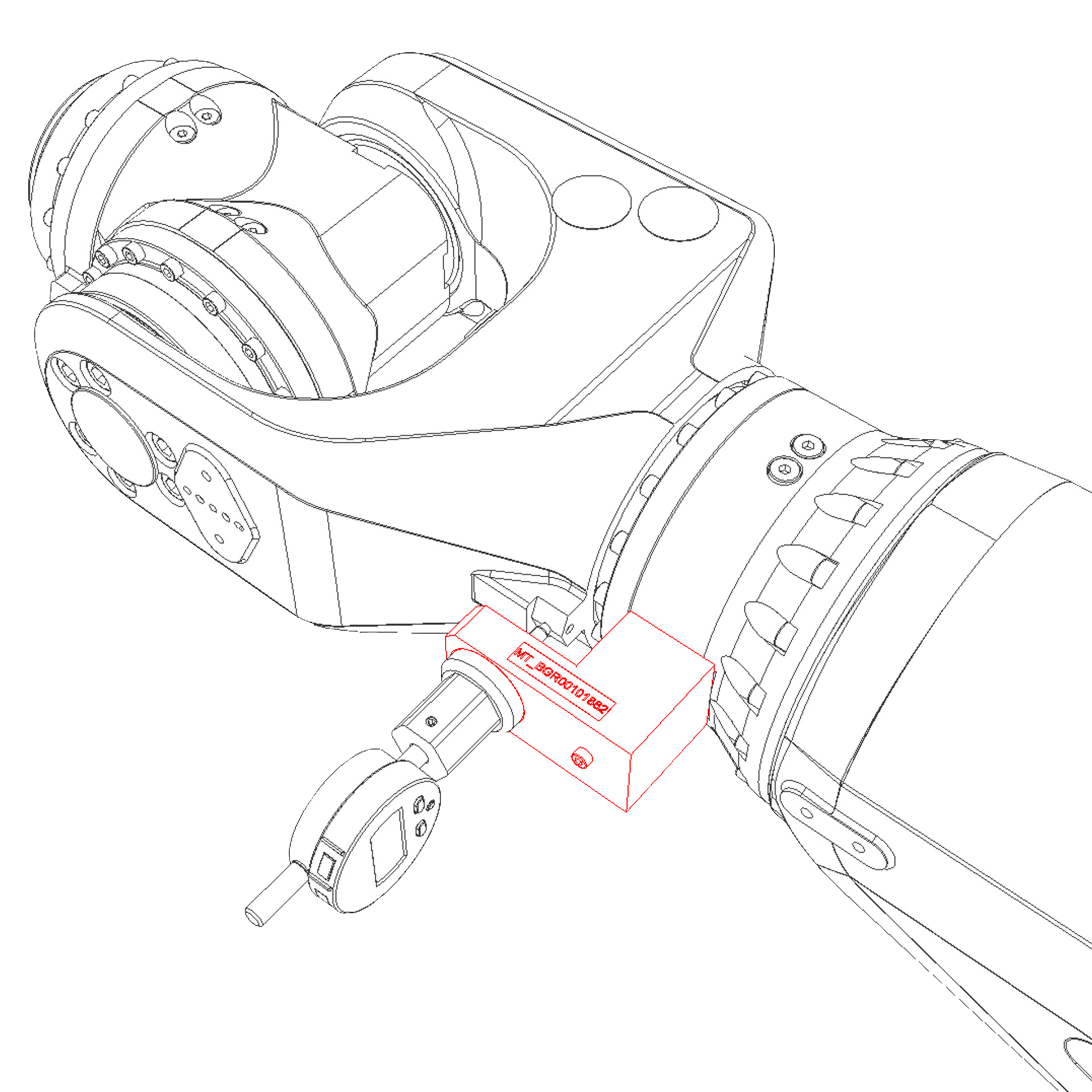
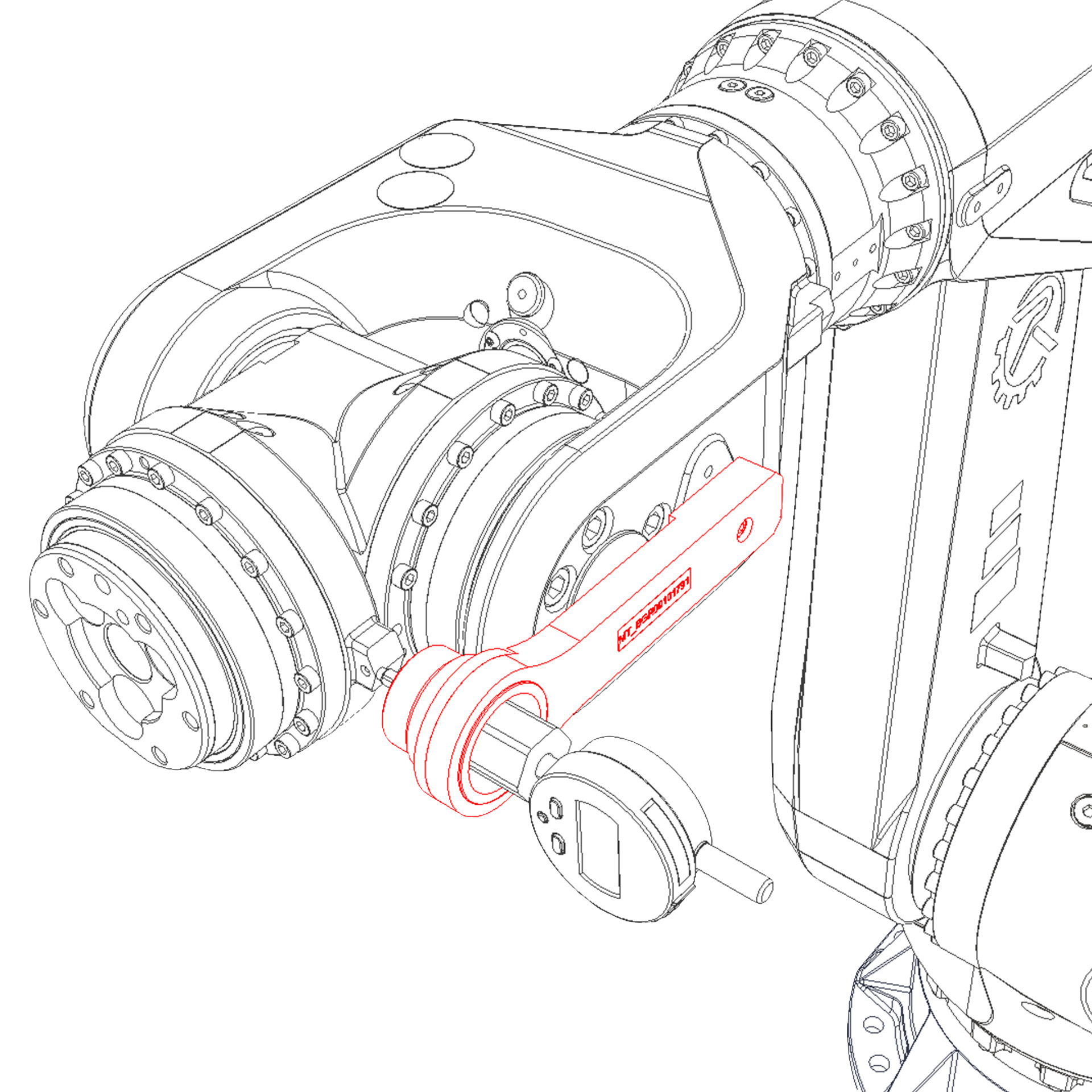
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. It is equipped with a digital dial gauge and is used to read out the measured values in connection with other calibration devices. The measured values can be read out safely outside the machine via RS232, USB, Digimatic and an additional extension cable. The calibration instructions can be found in the download area of the respective robot mechanics.
Scope of delivery
- Calibration device

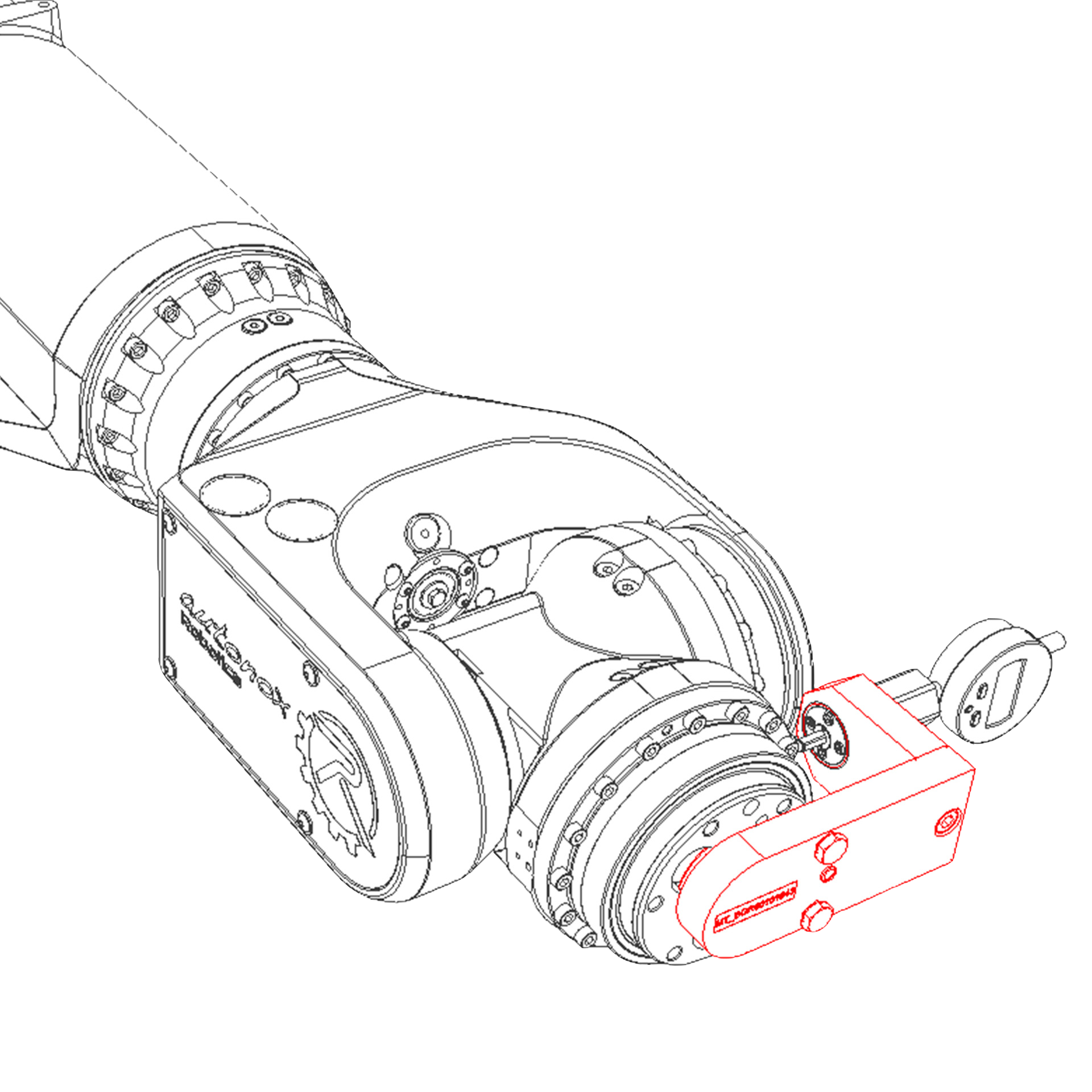
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

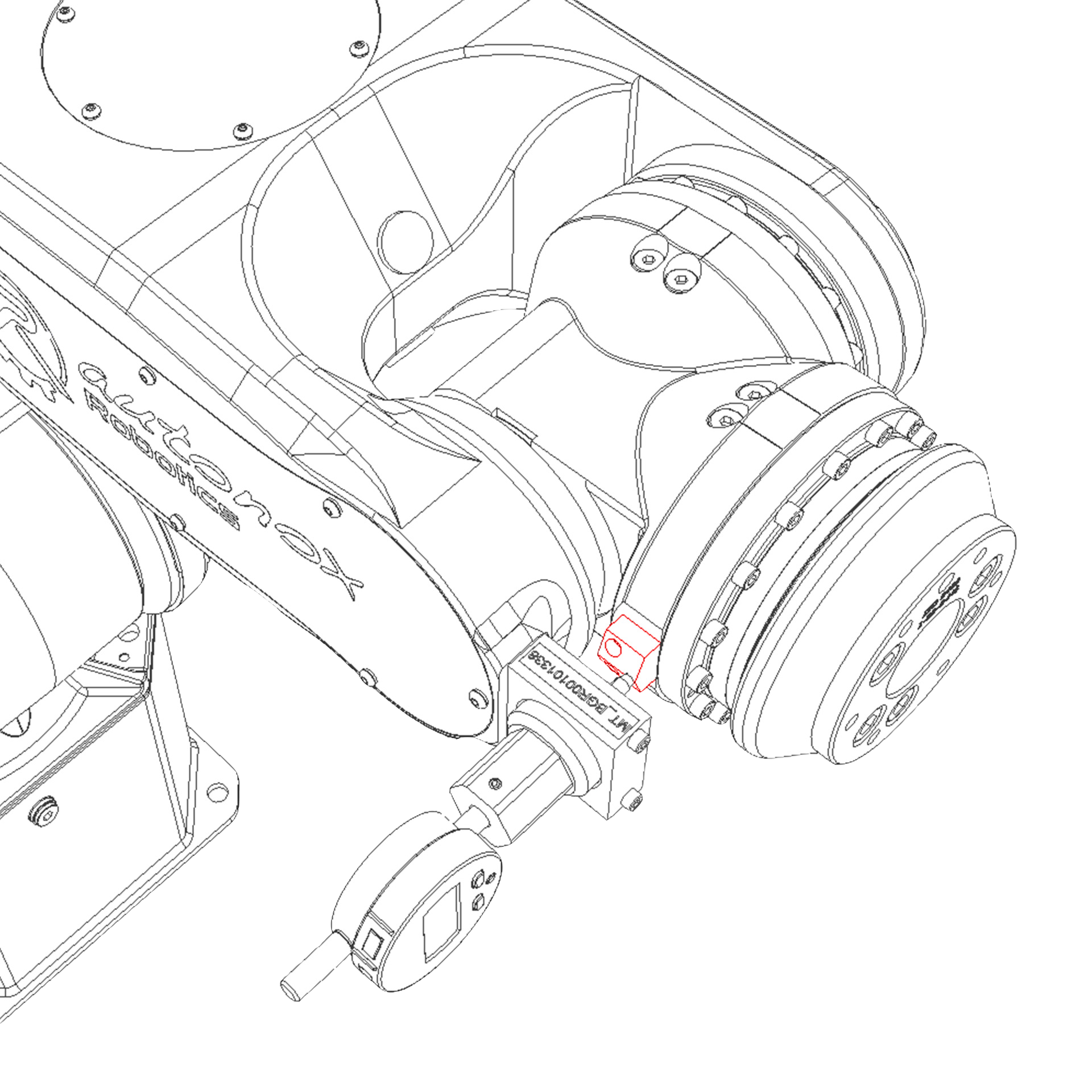
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

This carrier box is necessary for transporting the robot mechanics and is only suitable for transport by land.
Scope of delivery
- Carrier box incl. assembling/transport aid

This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
Scope of delivery
- Carrier box incl. assembling/transport aid
This type of robot is based on the principle of serial kinematics.
All drives and motor cables are moved along. The robot has three (3) translational and three (3) rotational degrees of freedom.
Highlight
The use of secondary-encoders is prepared for axes 1-6.
This robot mechanics was developed for applications that require maximum precision.
Legal notice
For patent law reasons not available and usable in the USA!
Scope of delivery
- Robot mechanics incl. gearbox
- Mounting adapter for secondary-encoders
- Installation of drive technology and the secondary-encoders (to be provided free of charge in each case)
- Multi-hour, logged test run as final quality inspection
- Threaded protection caps
- Transport and packing instructions
Required accessories
- Set of parts for installing the drive technology. This set consists of, for example, a servo motor adapter, servo motor cable, transmission input pinion, plug board (usually on the base frame).
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
| Field of application: | Standard (not hygienic), CNC Robotics |
|---|---|
| Kinematics: | Serial |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 3 |
| Nominal payload [kg|lbs]: | 45 | 99.2 |
| Supplementary load on the rotating column [kg|lbs]: | 70 | 154.3 |
| Supplementary load on the arm [kg|lbs]: | 40 | 88.2 |
| Working area-reach [mm|in]: | 2128 | 83.8 |
| Lubricants of the bearings: | Synthetic |
| Lubricants of the gearboxes: | Synthetic |
| Cleaning: | No high pressure |
| Protection class: | IP64 |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Floor, Ceiling |
| Special features: | The use of secondary encoders is prepared for axes 1-6. |
Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | AM8071-3SH1-1001 |
| M2 | AM8071-3SH1-1001 |
| M3 | AM8061-3KH1-1001 |
| M4 | AM8042-3FH1-1001 |
| M5 | AM8042-3FH1-1001 |
| M6 | AM8042-3FH1-1001 |
Suitable motors must be provided by the customer to autonox for assembly free of charge.
Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | MS2N07-D0BNN-CMUL2-NNNNN-NN |
| M2 | MS2N07-D0BNN-CMUL2-NNNNN-NN |
| M3 | MS2N06-D0BRN-CMUL2-NNNNN-NN |
| M4 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
| M5 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
| M6 | MS2N04-C0BTN-CMDL1-NNNNN-NN |
Suitable motors must be provided by the customer to autonox for assembly free of charge.
Motor |
Manufacturer article number (Specification) |
|---|---|
| M1 | 1FK2208-5AC10-1MB0 |
| M2 | 1FK2208-5AC10-1MB0 |
| M3 | 1FK2206-4AF10-1MB0 |
| M4 | 1FK7043-4CH71-1CB0-Z N05 |
| M5 | 1FK2104-5AF10-1MB0 |
| M6 | 1FK2104-5AF10-2MB0 |
Suitable motors must be provided by the customer to autonox for assembly free of charge.
-
Signed in / logged in you will receive further documents:
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. It is equipped with a digital dial gauge and is used to read out the measured values in connection with other calibration devices. The measured values can be read out safely outside the machine via RS232, USB, Digimatic and an additional extension cable. The calibration instructions can be found in the download area of the respective robot mechanics.
Scope of delivery
- Calibration device
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This carrier box is necessary for transporting the robot mechanics and is only suitable for transport by land.
Scope of delivery
- Carrier box incl. assembling/transport aid
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
Scope of delivery
- Carrier box incl. assembling/transport aid