
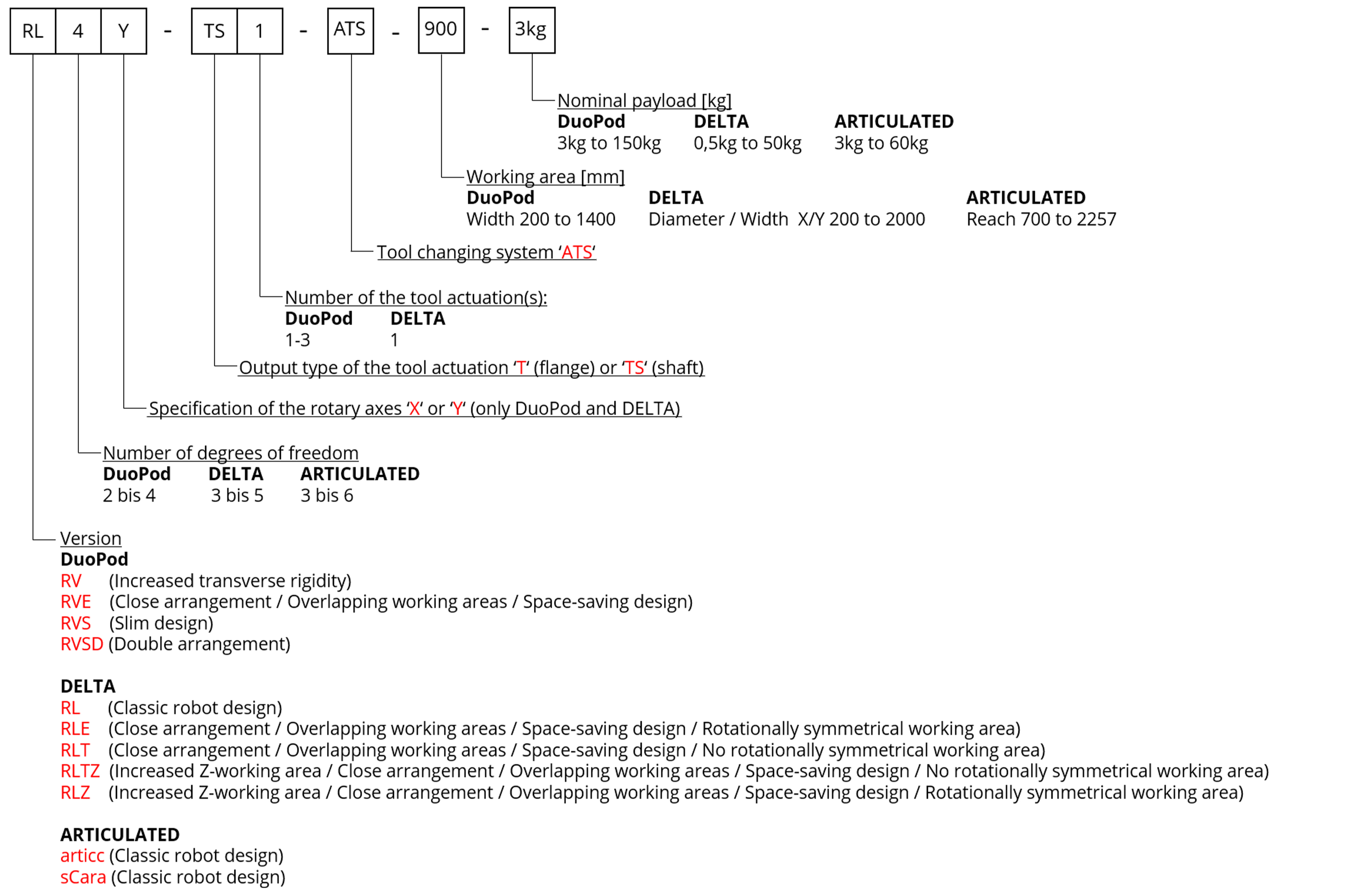


HHD DELTA RL4-1200-6kg
Delivery time: 12-14 weeks after order confirmation (For larger quantities please contact us. The delivery time specification also applies to spare parts.)
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational and one (1) rotational degree(s) of freedom.
Scope of delivery
- Robot mechanics incl. gearbox
- Servo motor adapter
- Transport and packing instructions
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).

Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | AM8042-0F21 |
| M2 | AM8042-0F21 |
| M3 | AM8042-0F21 |
| M4 | AM8032-0E21 |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | MS2S05-C0BTN-IMHG1-NNDNN-NN |
| M2 | MS2S05-C0BTN-IMHG1-NNDNN-NN |
| M3 | MS2S05-C0BTN-IMHG1-NNDNN-NN |
| M4 | MS2S04-C0BTN-IMHG1-NNDNN-NN |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | DMS2-100-0060-60-B1xxG1-Q000-0 |
| M2 | DMS2-100-0060-60-B1xxG1-Q000-0 |
| M3 | DMS2-100-0060-60-B1xxG1-Q000-0 |
| M4 | DMS2-070-0024-60-B1xxG1-Q000-1 |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | VPL-B1003T-PK14AA |
| M2 | VPL-B1003T-PK14AA |
| M3 | VPL-B1003T-PK14AA |
| M4 | VPL-B0753F-PK14AA |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | CMP63M/BK/PK/AK0H/SB1 |
| M2 | CMP63M/BK/PK/AK0H/SB1 |
| M3 | CMP63M/BK/PK/AK0H/SB1 |
| M4 | CMP50M/BK/PK/AK0H/SB1 |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation 1) |
Manufacturer article number (Recommendation 2) | Manufacturer article number (Recommendation 3) |
|---|---|---|---|
| M1 | 1FK7044-4CH71-1RH2 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 |
| M2 | 1FK7044-4CH71-1RH2 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 |
| M3 | 1FK7044-4CH71-1RH2 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 |
| M4 | 1FK7034-2AK71-1RH2 | 1FK2104-5AF10-2MA0 | 1FK2104-5AF10-2MB0 |
Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
| Field of application: | Hygienic ′HHD′ |
|---|---|
| Kinematics: | Parallel |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 1 |
| Nominal payload [kg|lbs]: | 6 | 13.2 |
| Working area-diameter [mm|in]: | 1200 | 47.2 |
| Working height outside [mm|in]: | 250 | 9.8 |
| Working height center [mm|in]: | 418 | 16.5 |
| Max. acceleration torque of the rotation γ around Z at the output [Nm|in.lbs]: | 40 | 354.0 |
| Nominal torque of the rotation γ around Z at the output [Nm|in.lbs]: | 40 | 354.0 |
| Max. speed of the rotation γ around Z at the output [1/min]: | 300 |
| Nominal speed of the rotation γ around Z at the output [1/min]: | 200 |
| Bearing type of the telescopic shaft(s): | Roller bearing |
| Bearing type of the arm joints: | Roller bearing |
| Lubricants of the bearings: | Food-grade (FO) |
| Lubricants of the gearboxes: | Synthetic |
| Cleaning: | Up to 28 bar | 406 psi high pressure |
| Protection class: | IP69K |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Ceiling, Wall (on request), Angle (on request) |
| Robot weight without drive engineering (esp. drive) [kg|lbs]: | 125 | 275.6 |
-
Signed in / logged in you will receive further documents:
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
| Gearbox article numbers for this robot mechanics | ||
|---|---|---|
| Function | Article number | Document |
| Drive of the upper arms | MT_BGR00013926-xx | Operating manual gearbox type 3 (PDF) |
| Drive of the telescopic shaft for rotation γ around Z | MT_BGR00018204-xx | Operating manual gearbox type 3 (PDF) |