
|
2DoF
|
3DoF
|
4DoF
|
5DoF
|
6DoF
|
|
|
DuoPod
|
|||||
|
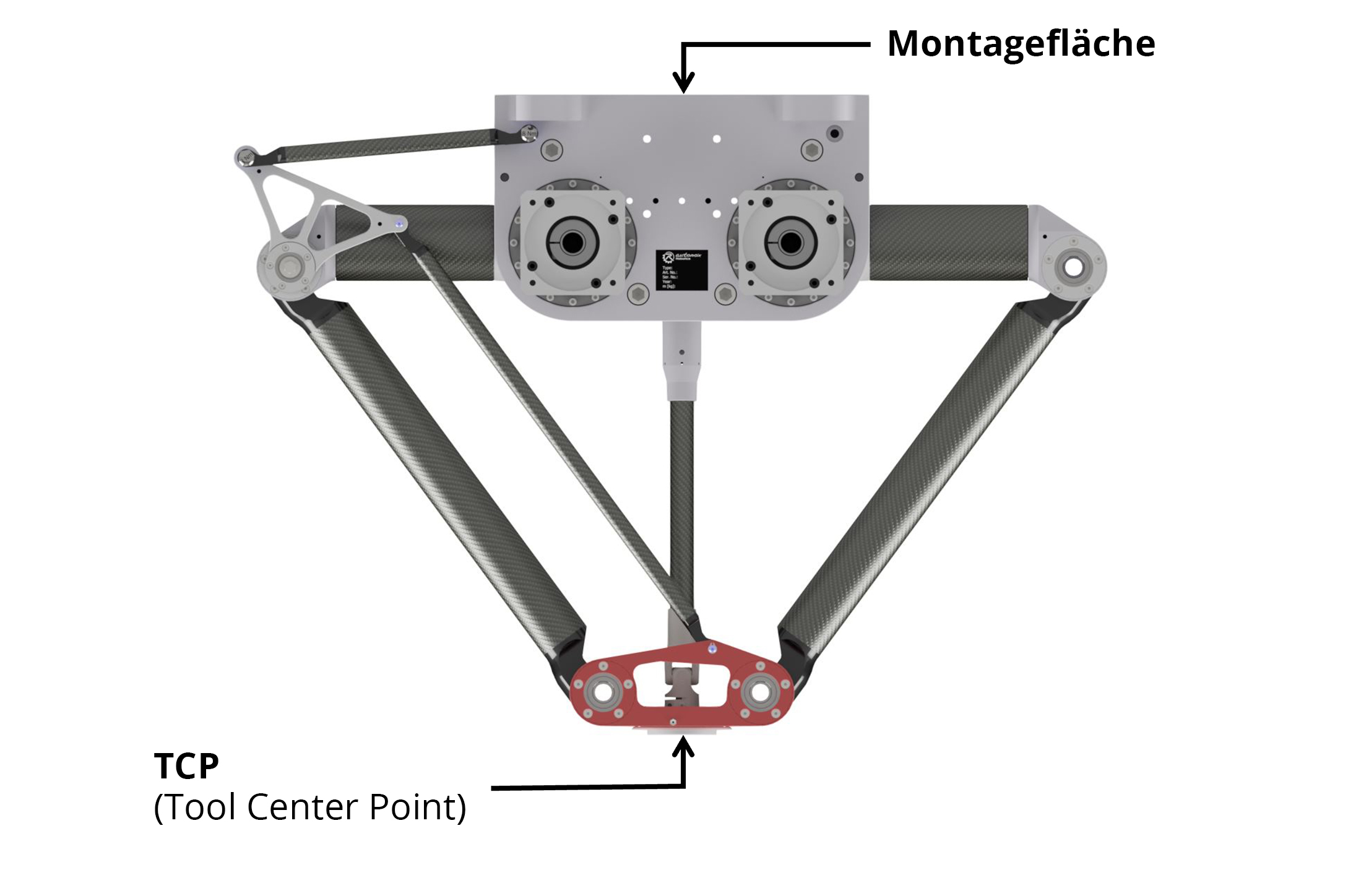
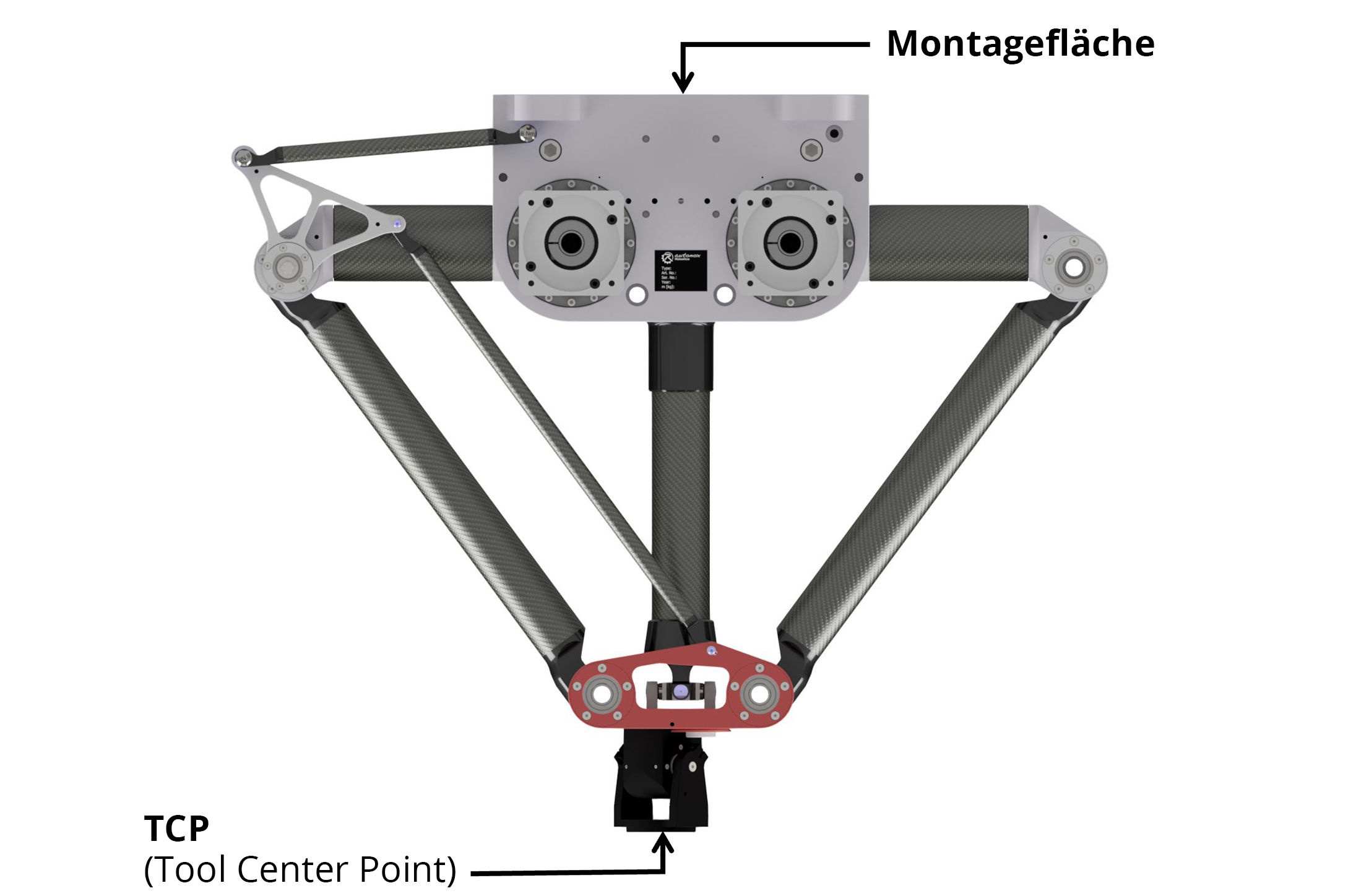
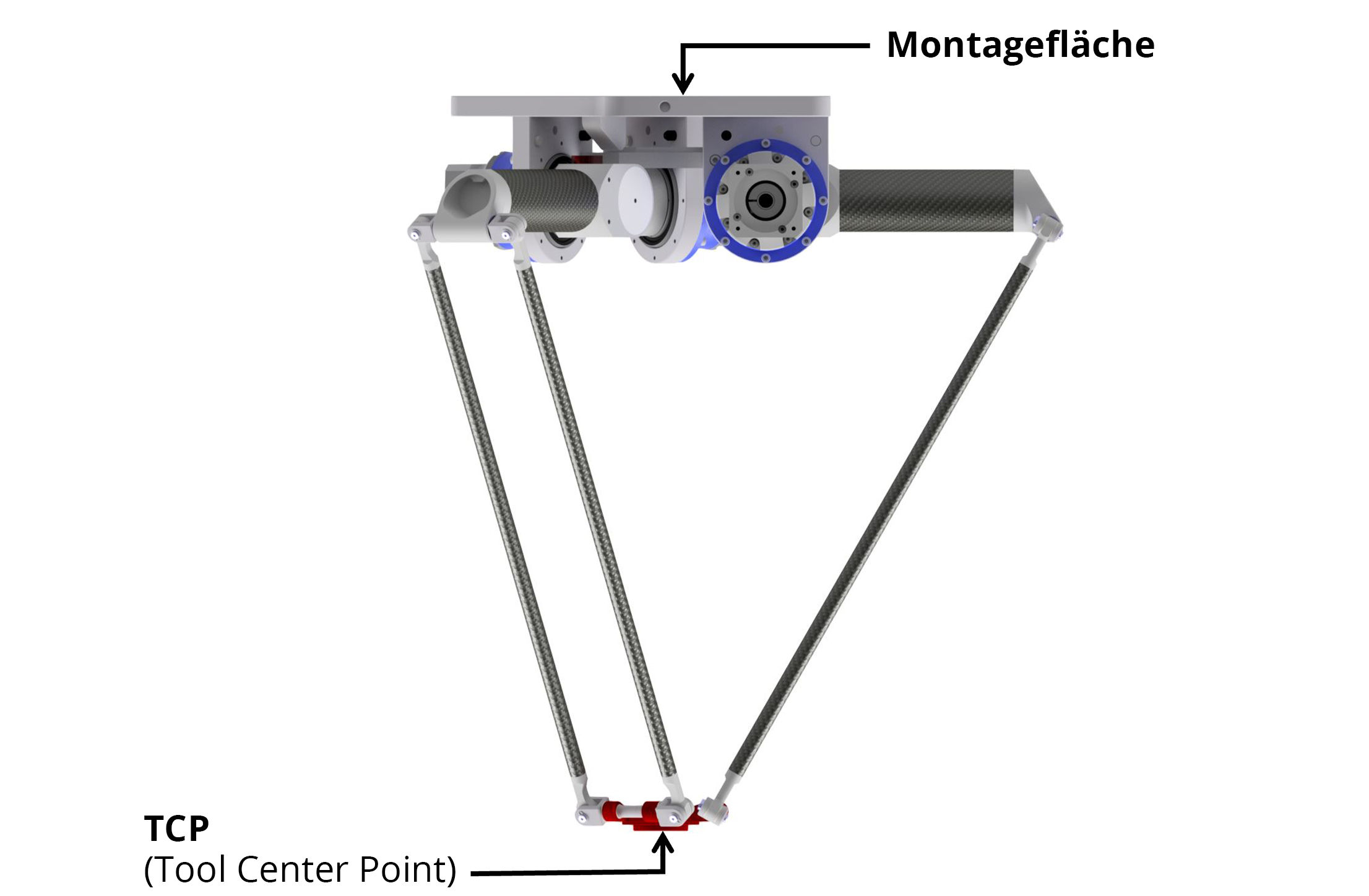
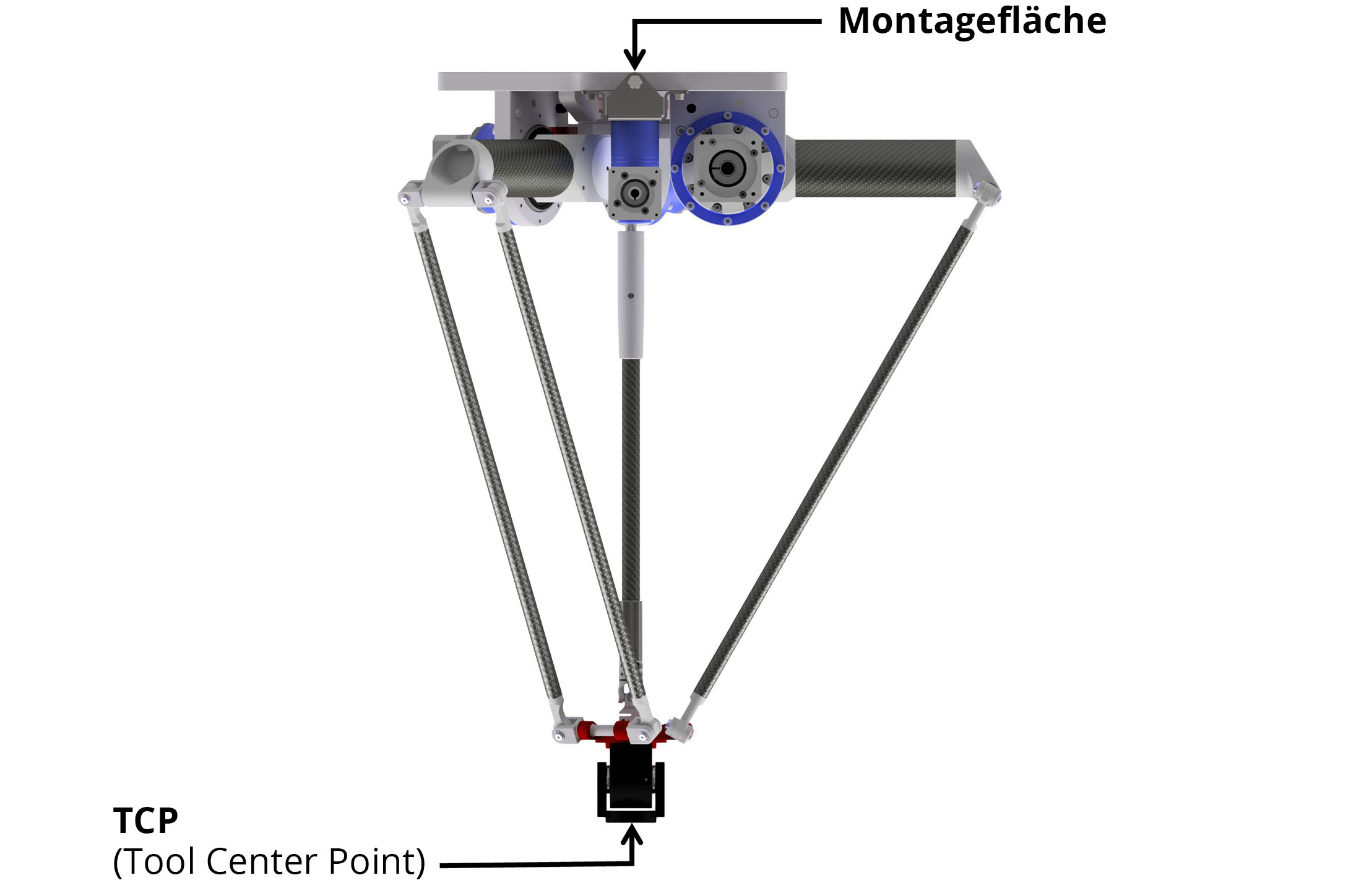
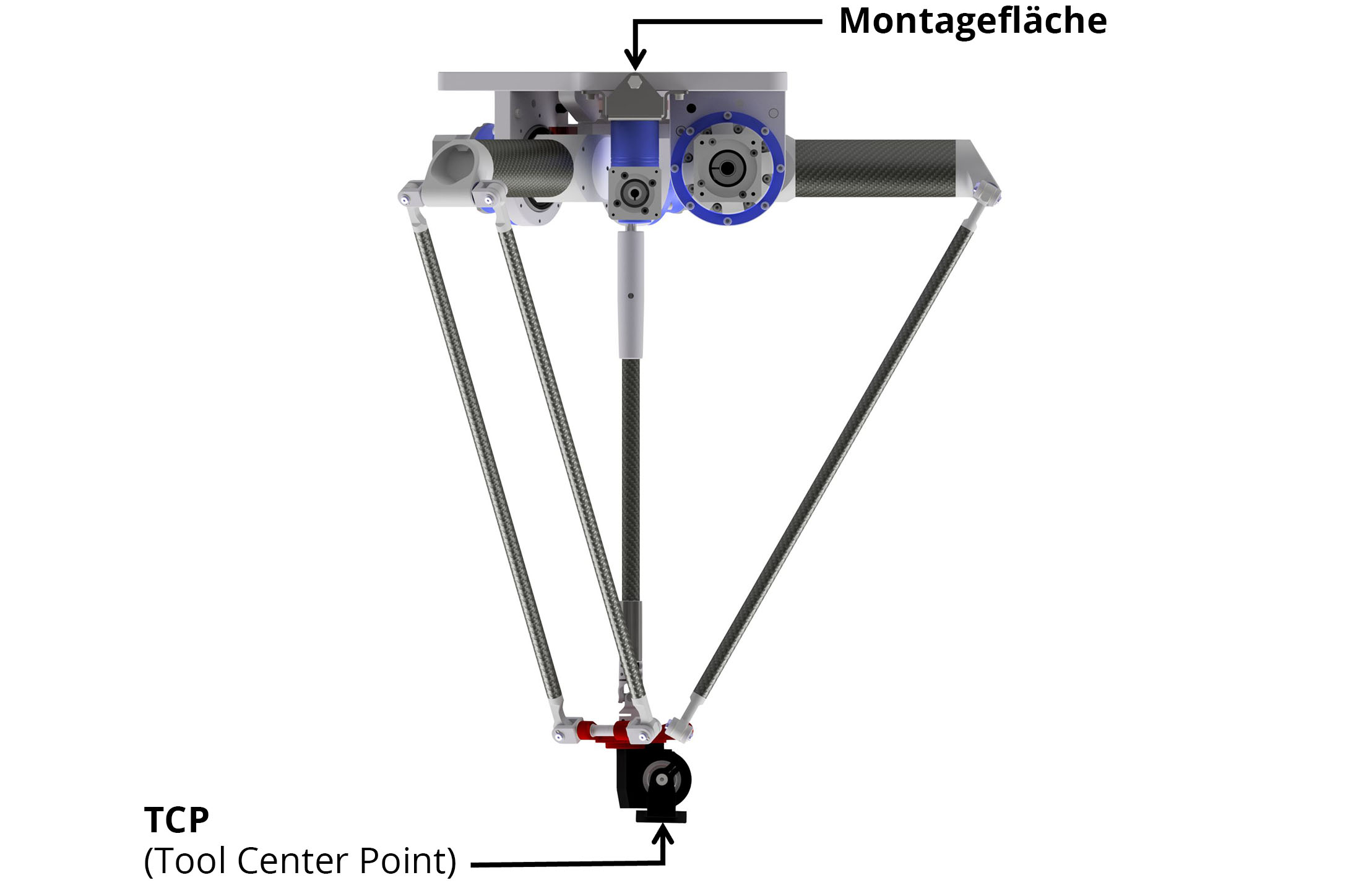
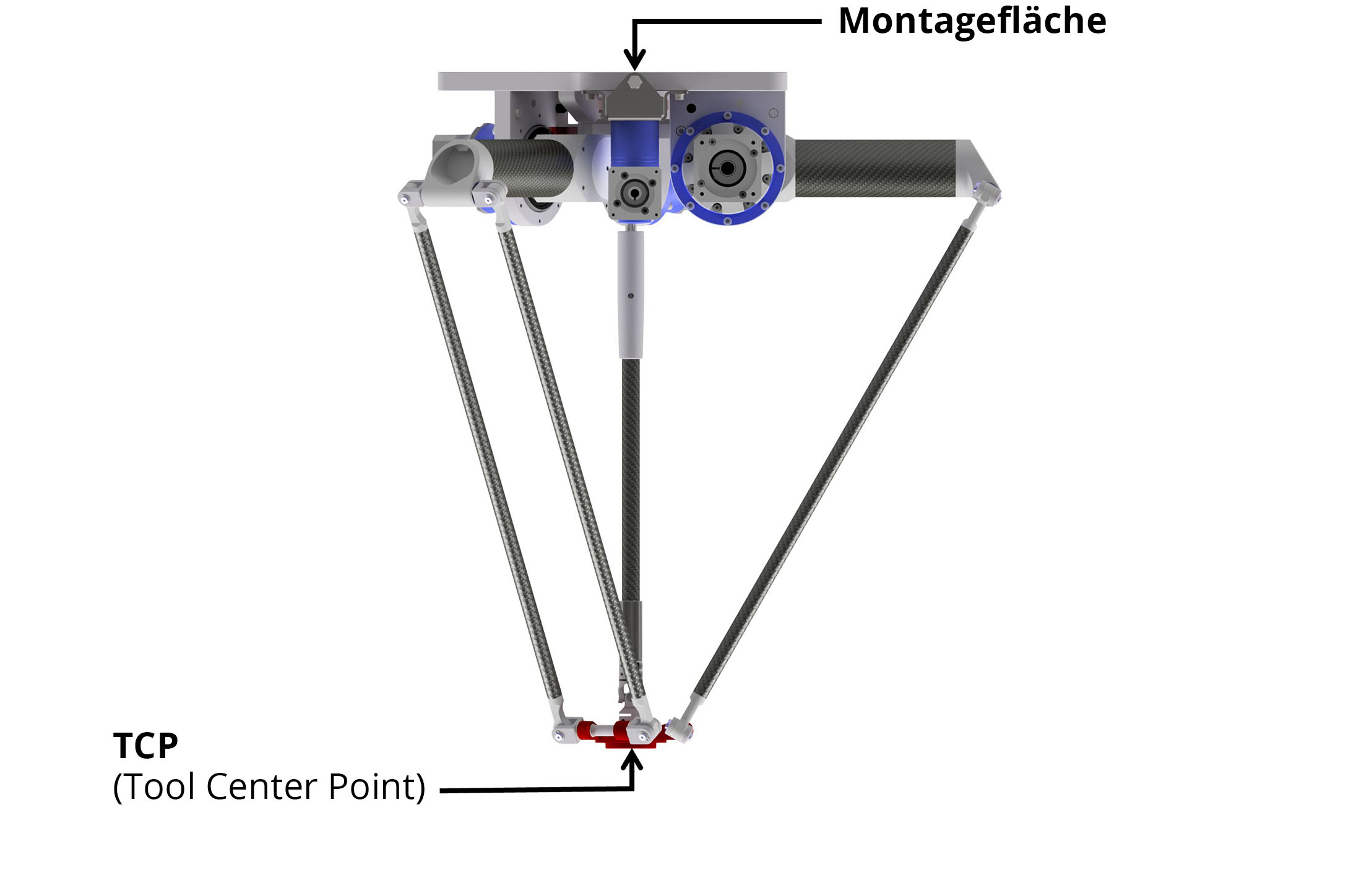
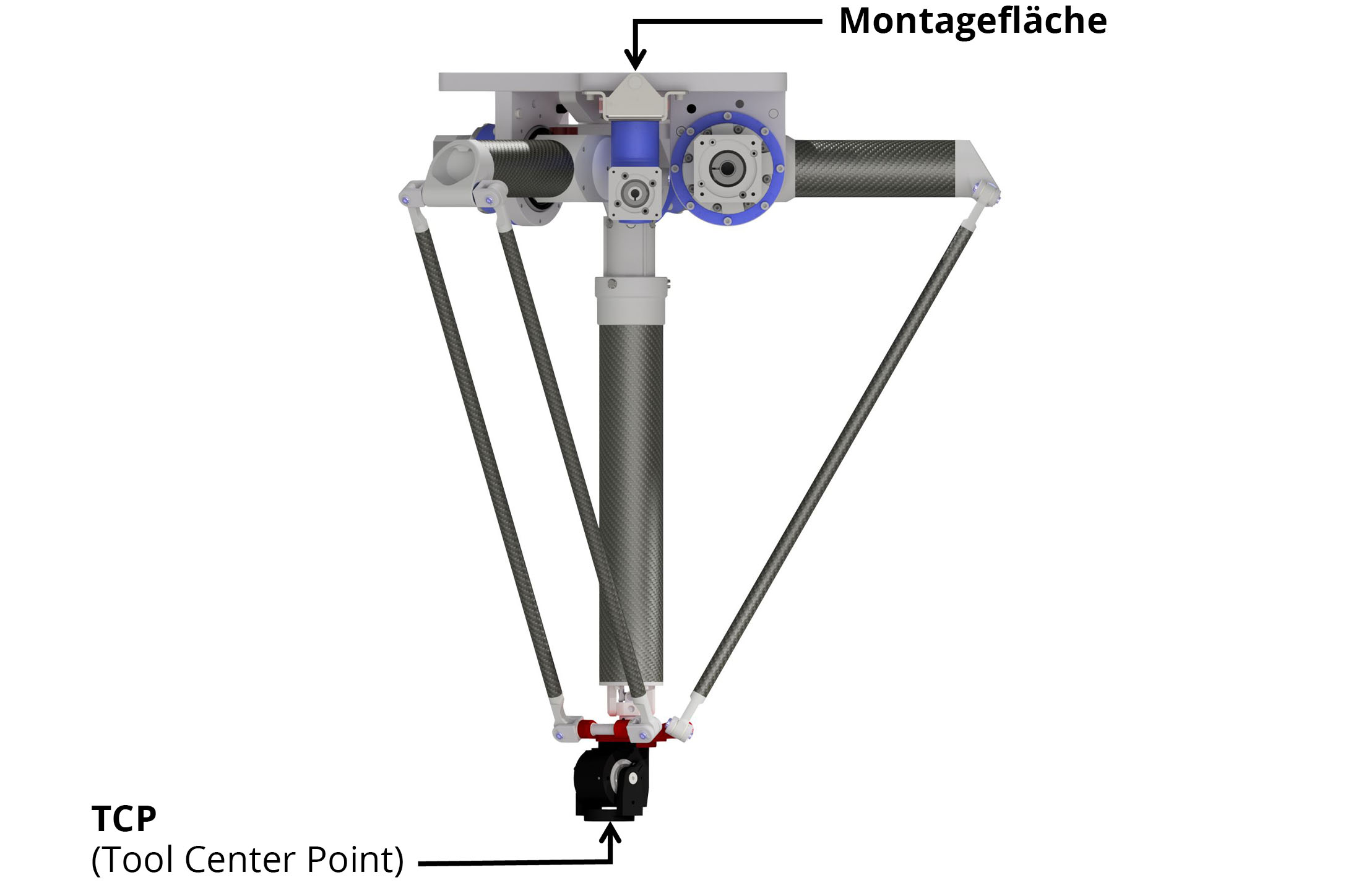
DELTA
|
|||||
|
KNICKARM
|
.jpg)
.jpg)
.jpg)
Alle Filter entfernen
Verfügbare Produkte: 0
Artikelnummer: A_00833.50-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 12 | 26.5 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 300 | 11.8 |
Artikelnummer: A_00062-02

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 1 | 2.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 200 | 7.9 |
Artikelnummer: A_00064-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 20 | 44.1 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 300 | 11.8 |
Artikelnummer: AL_10005

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
|
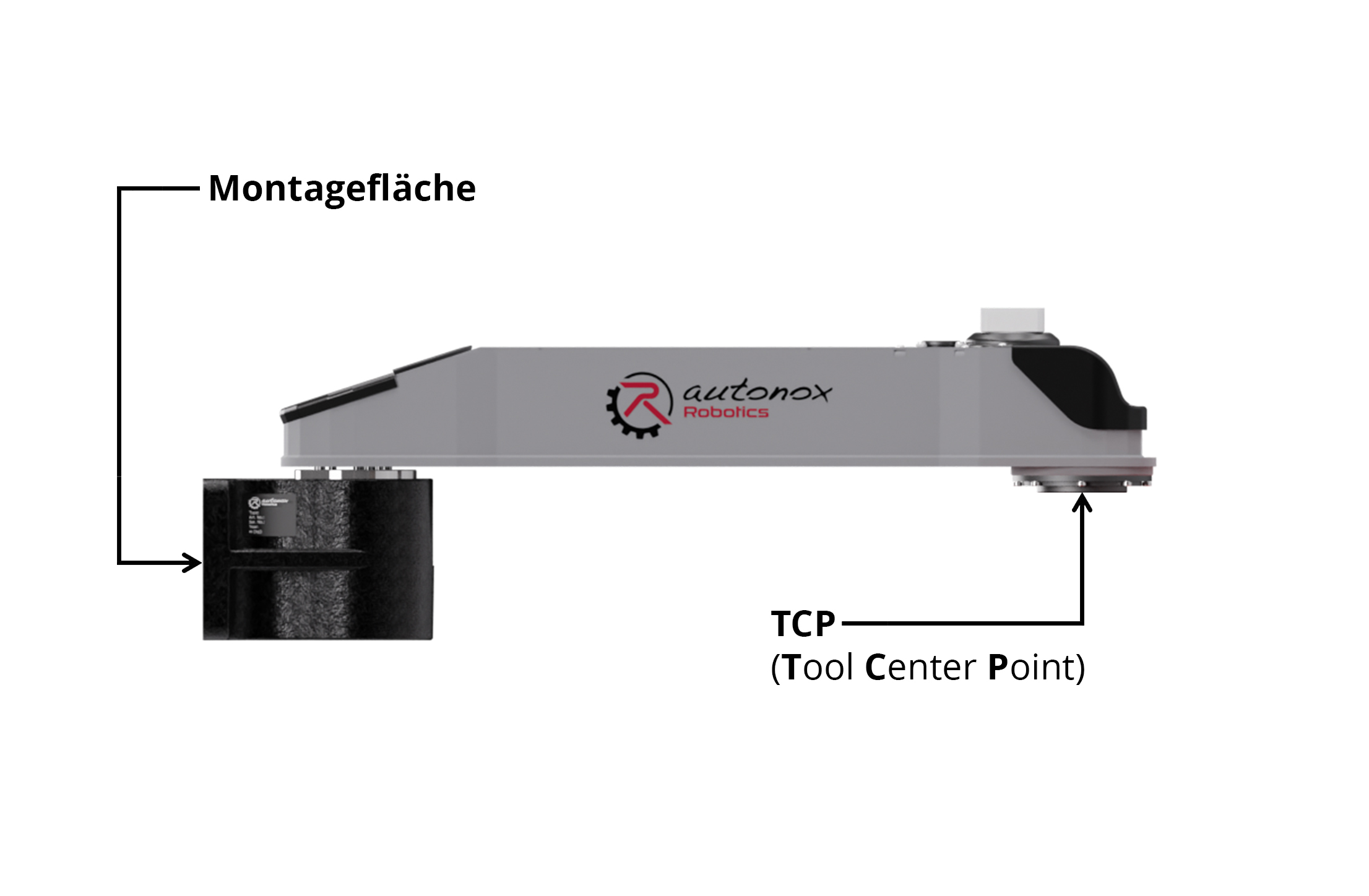
Die Kopfplatte gehört nicht zum Lieferumfang, d.h. die Getriebeträger werden direkt an den Maschinenrahmen befestigt. Vorteile: kompakt, preiswert
|
|
Artikelnummer: A_00035-02

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 200 | 7.9 |
Artikelnummer: AL_00005

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00050-02

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 6 | 13.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 6 | 13.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00051-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 6 | 13.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1300 | 51.2 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00827-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 12 | 26.5 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1400 | 55.1 |
| Arbeitshöhe außen [mm|in]: | 350 | 13.8 |
Artikelnummer: A_00865

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 1 | 2.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1400 | 55.1 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00063-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 20 | 44.1 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1400 | 55.1 |
| Arbeitshöhe außen [mm|in]: | 350 | 13.8 |
Artikelnummer: A_00863

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1400 | 55.1 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00055-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 6 | 13.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1400 | 55.1 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00826-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 12 | 26.5 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1600 | 63.0 |
| Arbeitshöhe außen [mm|in]: | 400 | 15.7 |
Artikelnummer: A_00866

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 1 | 2.2 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1600 | 63.0 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Artikelnummer: A_00066-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 20 | 44.1 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1600 | 63.0 |
| Arbeitshöhe außen [mm|in]: | 400 | 15.7 |
Artikelnummer: A_00810-01

| Verwendungsbereich: | Standard (nicht hygienisch) |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1600 | 63.0 |
| Arbeitshöhe außen [mm|in]: | 250 | 9.8 |
Keine passende Mechanik gefunden?
Unser Roboter-Design basiert auf einer Modulbauweise. Durch die Standardisierung unserer Konstruktions- und Dokumentationsprozesse haben wir die Möglichkeit, sehr schnell neue Mechaniken auf der Basis bereits Bestehender in unser Portfolio aufzunehmen.
Sprechen Sie uns an!