
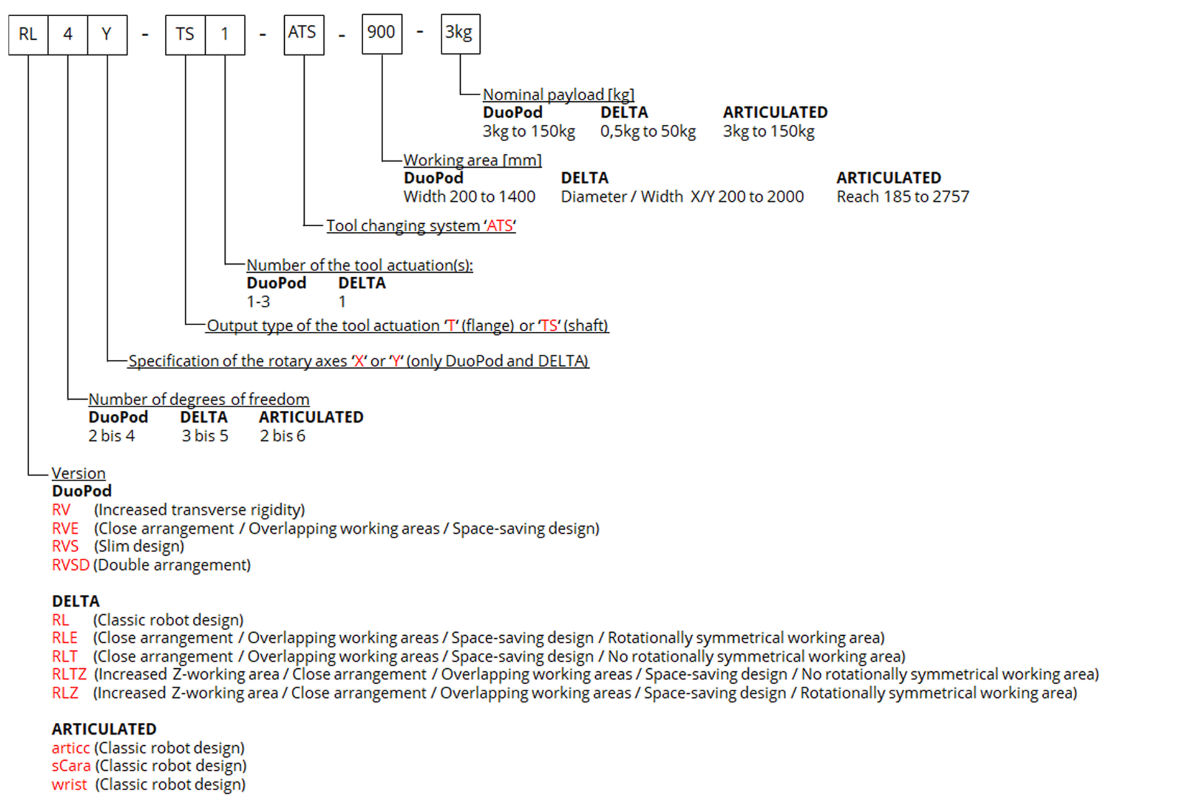


DELTA RL3-1600-12kg
Delivery time: max. 12-14 weeks after order confirmation (For larger quantities please contact us. The delivery time specification also applies to spare parts.)
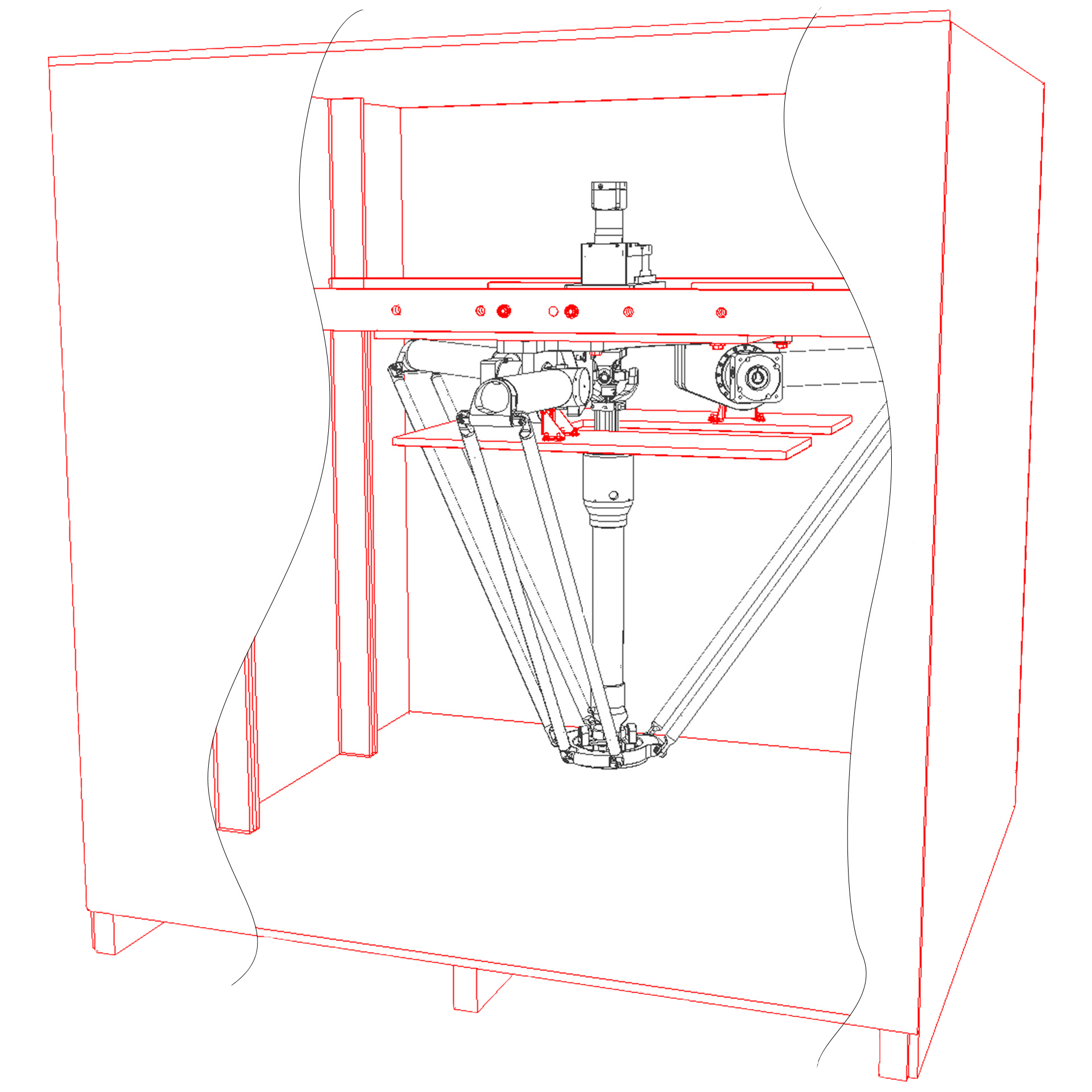
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational degrees of freedom.
Scope of delivery
- Robot mechanics incl. gearbox
- Servo motor adapter
- Threaded protection caps
- Transport and packing instructions
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
-
Signed in / logged in you will receive further documents:
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
| Field of application: | Standard (not hygienic) |
|---|---|
| Kinematics: | Parallel |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 0 |
| Nominal payload [kg|lbs]: | 12 | 26.5 |
| Working area-diameter [mm|in]: | 1600 | 63.0 |
| Working height outside [mm|in]: | 400 | 15.7 |
| Working height center [mm|in]: | 620 | 24.4 |
| Bearing type of the arm joints: | Roller bearing |
| Lubricants of the gearboxes: | Synthetic |
| Cleaning: | No high pressure |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Floor, Ceiling, Wall (on request), Angle (on request) |
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | 8LSAB4.D9030D200-4 |
| M2 | 8LSAB4.D9030D200-4 |
| M3 | 8LSAB4.D9030D200-4 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | AM8053-0N21 |
| M2 | AM8053-0N21 |
| M3 | AM8053-0N21 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
| M2 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
| M3 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
| M2 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
| M3 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | TA43 V30 BF03 EN01 PT |
| M2 | TA43 V30 BF03 EN01 PT |
| M3 | TA43 V30 BF03 EN01 PT |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | DMS2-100-0100-30-B1xxG1-Q000-0 |
| M2 | DMS2-100-0100-30-B1xxG1-Q000-0 |
| M3 | DMS2-100-0100-30-B1xxG1-Q000-0 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
| M2 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
| M3 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | VPL-B1153F-PK14AA |
| M2 | VPL-B1153F-PK14AA |
| M3 | VPL-B1153F-PK14AA |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
| M2 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
| M3 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation 1) |
Manufacturer article number (Recommendation 2) | Manufacturer article number (Recommendation 3) |
|---|---|---|---|
| M1 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
| M2 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
| M3 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Axle |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | SGM7A-20D7F2C |
| M2 | SGM7A-20D7F2C |
| M3 | SGM7A-20D7F2C |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.

This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))

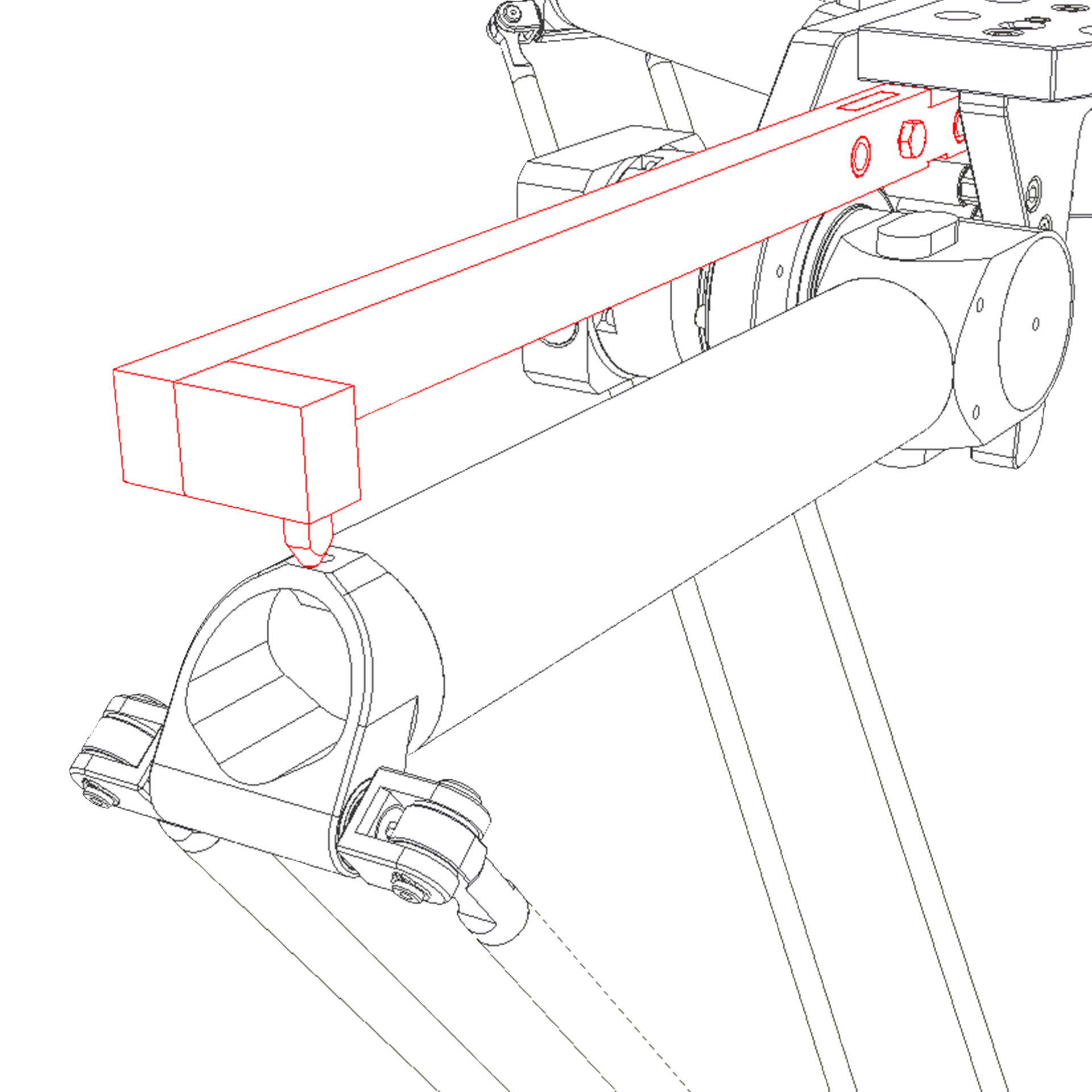
This mounting bracket can be used to secure media supplies, cables or similar. It is attached to the forearm of the parallel kinematics.

- Mounting bracket (1x upper part and 1x lower part)
- Screw(s)

This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
- Carrier box incl. assembling/transport aid
- Gearbox locks
This type of robot is based on the principle of parallel kinematics.
All drives are mounted in a fixed position on the robot head. Motor cables are not moved. The robot has three (3) translational degrees of freedom.
Scope of delivery
- Robot mechanics incl. gearbox
- Servo motor adapter
- Threaded protection caps
- Transport and packing instructions
Note: The operating instructions and documentation on commissioning, service, maintenance, etc. are available in the password-protected download area of the respective product page (www.autonoxfinder.com).
| Field of application: | Standard (not hygienic) |
|---|---|
| Kinematics: | Parallel |
| Translatory Degrees of Freedom (X,Y,Z): | 3 |
| Rotational Degrees of Freedom (α,ß,γ): | 0 |
| Nominal payload [kg|lbs]: | 12 | 26.5 |
| Working area-diameter [mm|in]: | 1600 | 63.0 |
| Working height outside [mm|in]: | 400 | 15.7 |
| Working height center [mm|in]: | 620 | 24.4 |
| Bearing type of the arm joints: | Roller bearing |
| Lubricants of the gearboxes: | Synthetic |
| Cleaning: | No high pressure |
| Ambient temperature [°C|°F]: | 0 to +40 | +32 to +104 |
| Relative humidity level [%]: | 95 (free of condensation) |
| Mounting position: | Floor, Ceiling, Wall (on request), Angle (on request) |

Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | 8LSAB4.D9030D200-4 |
| M2 | 8LSAB4.D9030D200-4 |
| M3 | 8LSAB4.D9030D200-4 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | AM8053-0N21 |
| M2 | AM8053-0N21 |
| M3 | AM8053-0N21 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
| M2 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
| M3 | MS2N05-D0BRN-MMHG1-NNDNN-NN |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
| M2 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
| M3 | ISD-520D6-09T0XX+FAHB+FCSS+FD24+FFM1+FG116+FN30+FSSS |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | TA43 V30 BF03 EN01 PT |
| M2 | TA43 V30 BF03 EN01 PT |
| M3 | TA43 V30 BF03 EN01 PT |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | DMS2-100-0100-30-B1xxG1-Q000-0 |
| M2 | DMS2-100-0100-30-B1xxG1-Q000-0 |
| M3 | DMS2-100-0100-30-B1xxG1-Q000-0 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
| M2 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
| M3 | MCS12H35-EKMP1-Axxx-xx6xxx-xxxx |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | VPL-B1153F-PK14AA |
| M2 | VPL-B1153F-PK14AA |
| M3 | VPL-B1153F-PK14AA |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
| M2 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
| M3 | CMP71M/BP/PK/AK0H/SB1 / Mat-Nr. 84207209.300 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation 1) |
Manufacturer article number (Recommendation 2) | Manufacturer article number (Recommendation 3) |
|---|---|---|---|
| M1 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
| M2 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
| M3 | 1FK2105-6AF11-0MA0 | 1FK2105-6AF11-0MB0 | 1FK7062-2AF71-1RH2 |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
Motor |
Manufacturer article number (Recommendation) |
|---|---|
| M1 | SGM7A-20D7F2C |
| M2 | SGM7A-20D7F2C |
| M3 | SGM7A-20D7F2C |
autonox Robotics does not assume any liability for the sufficient dimensioning of the motors in relation to the customer-specific application. Upon request, alternative motor types may be used instead of the recommended ones. However, mechanical compatibility must be verified and confirmed by autonox. Please note that it is essential to consult with autonox to specify the motor types before placing an order. The motors are not supplied by autonox Robotics.
-
Signed in / logged in you will receive further documents:
Note: If the documentation in the download area is not yet complete, please contact us (info@autonox.com).
This device is used to calibrate our robot mechanics. A defined motor position (encoder value) is assigned to the respective mechanical axis position. The calibration instructions can be found in the download area of the respective robot mechanics.
- Calibration device
- Mounting set (consisting of: Screw(s) and/or pin(s))
This mounting bracket can be used to secure media supplies, cables or similar. It is attached to the forearm of the parallel kinematics.
- Mounting bracket (1x upper part and 1x lower part)
- Screw(s)
This carrier box is necessary for transporting the robot mechanics. It can be used for transport by land, air and sea.
- Carrier box incl. assembling/transport aid
- Gearbox locks