
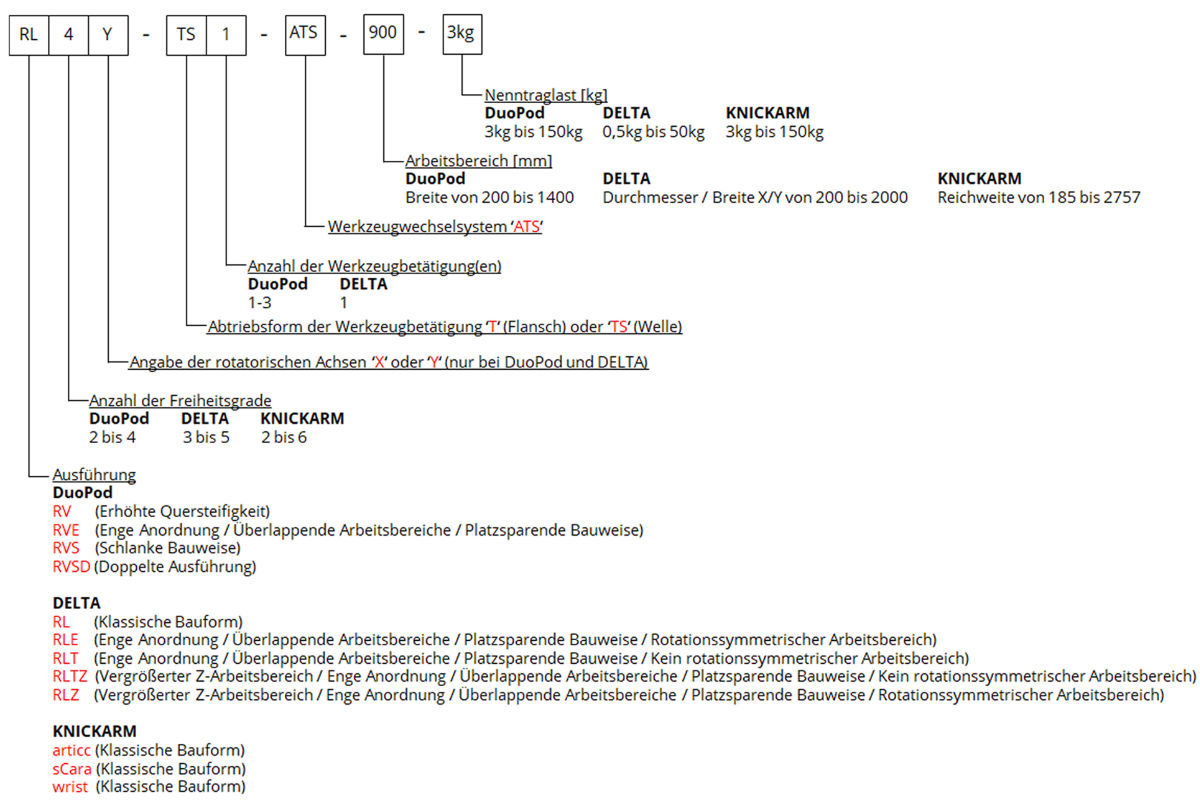


KNICKARM articc3-1943-30kg
Lieferzeit: max. 22-24 Wochen nach Auftragsbestätigung (Bei großen Mengen bitten wir um Rücksprache. Die Lieferzeitangabe gilt auch für Ersatzteile.)
Dieser Robotertyp basiert auf dem Prinzip der seriellen Kinematik.
Alle Antriebe und Motorkabel, außer der ortsfesten Achse 1, werden mitbewegt. Der Roboter hat zwei (2) translatorische und einen (1) rotatorischen Freiheitsgrad(e).
Lieferumfang
- Robotermechanik inkl. Getriebe
- Montage kostenlos beigestellter Antriebstechnik
- Mehrstündiger, protokollierter Testlauf als Qualitätsendkontrolle
- Gewinde-Schutzkappen
- Transport- und Verpackungsanleitung
Notwendiges Zubehör
- Teilesatz zum Anbau der Antriebstechnik. Dieser besteht bspw. aus Servomotor-Adapter, Servomotor-Kabel, Getriebe-Eingangsritzel, Steckerfeld (i.d.R. am Grundgestell).
Hinweis: Die Betriebsanleitung und Dokumentation zur Inbetriebnahme, Service, Wartung, usw. erhalten Sie im passwortgeschützten Download-Bereich der jeweiligen Produktseite (www.autonoxfinder.com).
-
Registriert bzw. angemeldet erhalten Sie weitere Dokumente:
Hinweis: Sollte die Dokumentation im Download-Bereich noch nicht vollständig sein, bitten wir Sie um Kontaktaufnahme (info@autonox.com).
| Verwendungsbereich: | Standard (nicht hygienisch) |
|---|---|
| Kinematik: | Seriell |
| Translatorische Freiheitsgrade (X,Y,Z): | 2 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 1 |
| Nenntraglast [kg|lbs]: | 30 | 66.1 |
| Zusatzlast am Arm [kg|lbs]: | 40 | 88.2 |
| Arbeitsbereichs-Reichweite [mm|in]: | 1943 | 76.5 |
| Schmierstoffe der Lagerstellen: | Synthetisch |
| Schmierstoffe der Getriebe: | Synthetisch |
| Reinigung: | Kein Hochdruck |
| Schutzklasse: | IP64 |
| Umgebungstemperatur [°C|°F]: | 0 bis +40 | +32 bis +104 |
| Relative Luftfeuchtigkeit [%]: | 95 (kondensationsfrei) |
| Einbaulage: | Boden, Decke, Wand, Winkel |
| Gewicht der Robotermechanik ohne Antriebstechnik (insb. Motoren) [kg|lbs]: | 150 | 330.7 |
Achse |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | AM8071-3SH1-1001 |
| M2 | AM8061-3KH1-1001 |
| M3 | AM8042-3FH1-1001 |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Achse |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | VPC-B1653D-QJ14AS |
| M2 | VPL-B1303F-QJ14AA |
| M3 | VPL-B1002M-QJ14AA |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Achse |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | 1FK2208-5AC10-1MB0 |
| M2 | 1FK2206-4AF10-1MB0 |
| M3 | 1FK2104-5AF10-1MB0 |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Achse |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | SGM7A-50A6A6C |
| M2 | SGM7A-20A6A6C |
| M3 | SGM7A-06A6A6C |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.

Dieses Kalibierset beinhaltet alle für die Kalibrierung der Robotermechanik benötigten Kalibriervorrichtungen sowie einen handlichen Schutzkoffer mit speziellem Inlay. Der Koffer eignet sich hervorragend zur Aufbewahrung und zum Transport dieser Vorrichtungen.
Lieferumfang
Kalibrierset bestehend aus:
- Kalibiervorrichtung MT_BGR00020965
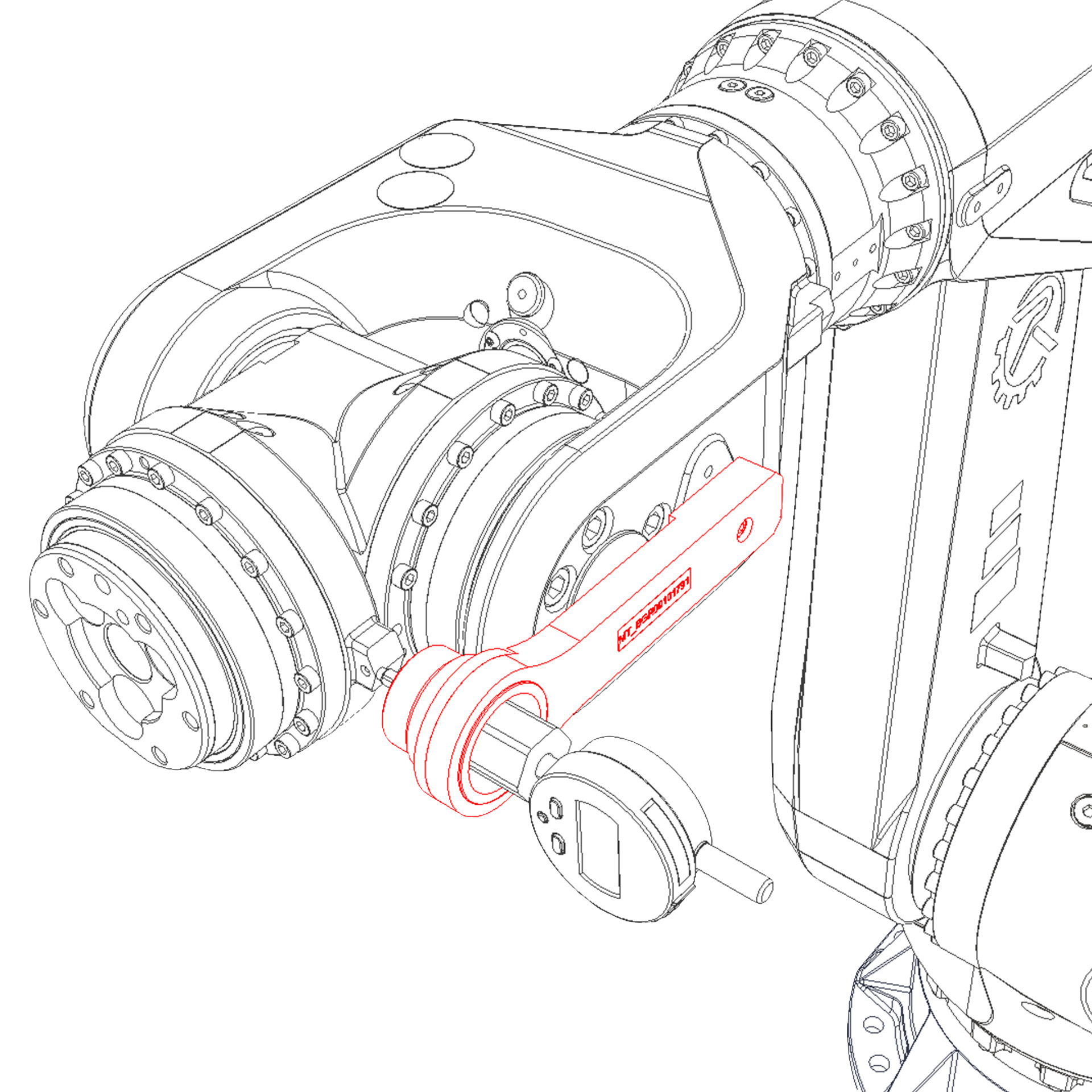
- Kalibiervorrichtung MT_BGR00101791
- Kalibiervorrichtung MT_BGR00020307
- Schutzkoffer mit Inlay

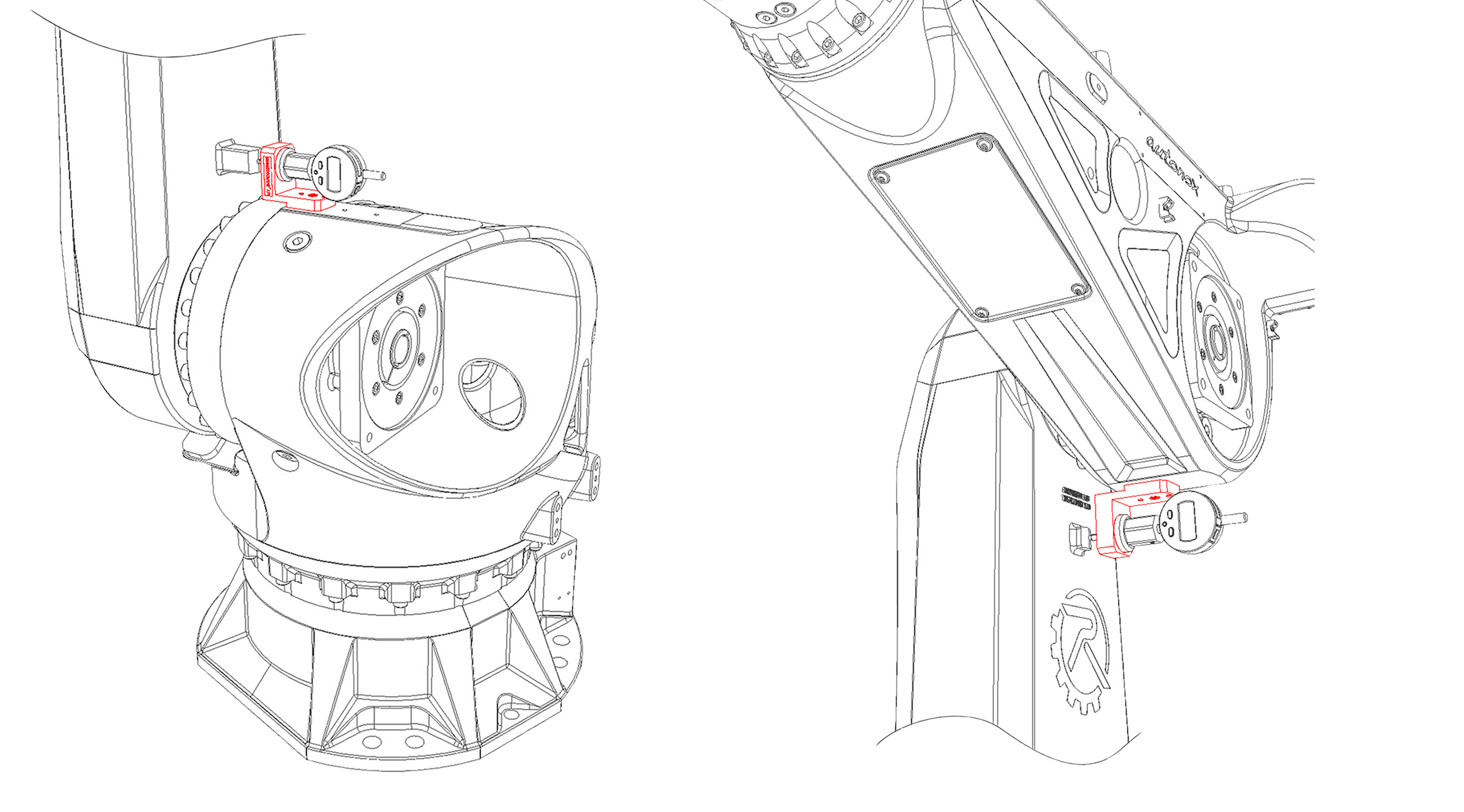
Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Sie ist mit einer digitalen Messuhr ausgestattet und wird zum Auslesen der Messwerte, in Verbindung mit anderen Kalibriervorrichtungen, verwendet. Die Messwerte können über RS232, USB, Digimatic und ein entsprechendes Verlängerungskabel außerhalb der Maschine sicher ausgelesen werden. Die Kalibrier-Anleitungen finden Sie im Downloadbereich der jeweiligen Robotermechanik.
Lieferumfang
- Kalibriervorrichtung

Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))

Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))

Diese Transportkiste wird zum Transport der Robotermechanik benötigt und ist nur für den Versand per Landverkehr geeignet.
Lieferumfang
- Transportkiste
Dieser Robotertyp basiert auf dem Prinzip der seriellen Kinematik.
Alle Antriebe und Motorkabel, außer der ortsfesten Achse 1, werden mitbewegt. Der Roboter hat zwei (2) translatorische und einen (1) rotatorischen Freiheitsgrad(e).
Lieferumfang
- Robotermechanik inkl. Getriebe
- Montage kostenlos beigestellter Antriebstechnik
- Mehrstündiger, protokollierter Testlauf als Qualitätsendkontrolle
- Gewinde-Schutzkappen
- Transport- und Verpackungsanleitung
Notwendiges Zubehör
- Teilesatz zum Anbau der Antriebstechnik. Dieser besteht bspw. aus Servomotor-Adapter, Servomotor-Kabel, Getriebe-Eingangsritzel, Steckerfeld (i.d.R. am Grundgestell).
Hinweis: Die Betriebsanleitung und Dokumentation zur Inbetriebnahme, Service, Wartung, usw. erhalten Sie im passwortgeschützten Download-Bereich der jeweiligen Produktseite (www.autonoxfinder.com).
| Verwendungsbereich: | Standard (nicht hygienisch) |
|---|---|
| Kinematik: | Seriell |
| Translatorische Freiheitsgrade (X,Y,Z): | 2 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 1 |
| Nenntraglast [kg|lbs]: | 30 | 66.1 |
| Zusatzlast am Arm [kg|lbs]: | 40 | 88.2 |
| Arbeitsbereichs-Reichweite [mm|in]: | 1943 | 76.5 |
| Schmierstoffe der Lagerstellen: | Synthetisch |
| Schmierstoffe der Getriebe: | Synthetisch |
| Reinigung: | Kein Hochdruck |
| Schutzklasse: | IP64 |
| Umgebungstemperatur [°C|°F]: | 0 bis +40 | +32 bis +104 |
| Relative Luftfeuchtigkeit [%]: | 95 (kondensationsfrei) |
| Einbaulage: | Boden, Decke, Wand, Winkel |
| Gewicht der Robotermechanik ohne Antriebstechnik (insb. Motoren) [kg|lbs]: | 150 | 330.7 |

Motor |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | AM8071-3SH1-1001 |
| M2 | AM8061-3KH1-1001 |
| M3 | AM8042-3FH1-1001 |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Motor |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | VPC-B1653D-QJ14AS |
| M2 | VPL-B1303F-QJ14AA |
| M3 | VPL-B1002M-QJ14AA |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Motor |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | 1FK2208-5AC10-1MB0 |
| M2 | 1FK2206-4AF10-1MB0 |
| M3 | 1FK2104-5AF10-1MB0 |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
Motor |
Artikelnummer Motorhersteller (Vorgabe) |
|---|---|
| M1 | SGM7A-50A6A6C |
| M2 | SGM7A-20A6A6C |
| M3 | SGM7A-06A6A6C |
Die Motoren müssen vom Kunden beim Hersteller bestellt und an autonox zur Montage kostenlos beigestellt werden.
-
Registriert bzw. angemeldet erhalten Sie weitere Dokumente:
Hinweis: Sollte die Dokumentation im Download-Bereich noch nicht vollständig sein, bitten wir Sie um Kontaktaufnahme (info@autonox.com).
Dieses Kalibierset beinhaltet alle für die Kalibrierung der Robotermechanik benötigten Kalibriervorrichtungen sowie einen handlichen Schutzkoffer mit speziellem Inlay. Der Koffer eignet sich hervorragend zur Aufbewahrung und zum Transport dieser Vorrichtungen.
Lieferumfang
Kalibrierset bestehend aus:
- Kalibiervorrichtung MT_BGR00020965
- Kalibiervorrichtung MT_BGR00101791
- Kalibiervorrichtung MT_BGR00020307
- Schutzkoffer mit Inlay
Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Sie ist mit einer digitalen Messuhr ausgestattet und wird zum Auslesen der Messwerte, in Verbindung mit anderen Kalibriervorrichtungen, verwendet. Die Messwerte können über RS232, USB, Digimatic und ein entsprechendes Verlängerungskabel außerhalb der Maschine sicher ausgelesen werden. Die Kalibrier-Anleitungen finden Sie im Downloadbereich der jeweiligen Robotermechanik.
Lieferumfang
- Kalibriervorrichtung
Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))
Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))
Diese Transportkiste wird zum Transport der Robotermechanik benötigt und ist nur für den Versand per Landverkehr geeignet.
Lieferumfang
- Transportkiste