
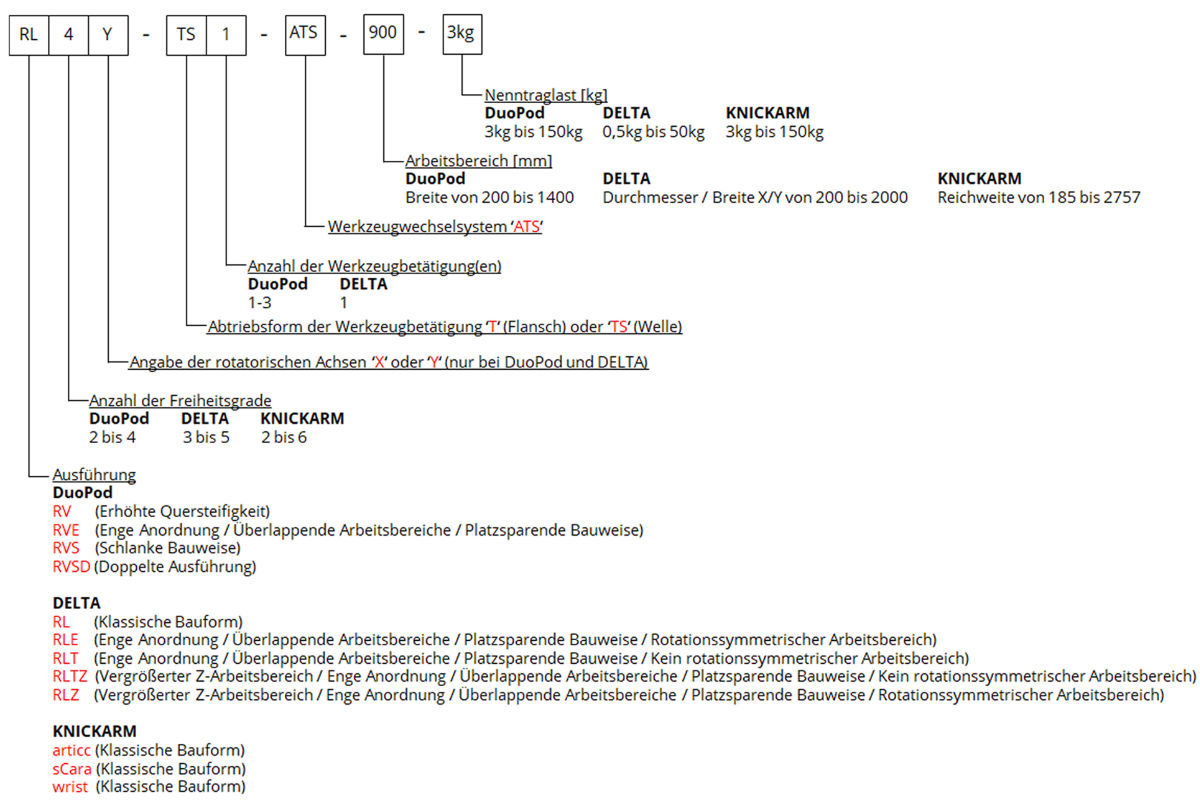


DELTA RL3-T1-1200-3kg
Lieferzeit: max. 12-14 Wochen nach Auftragsbestätigung (Bei großen Mengen bitten wir um Rücksprache. Die Lieferzeitangabe gilt auch für Ersatzteile.)
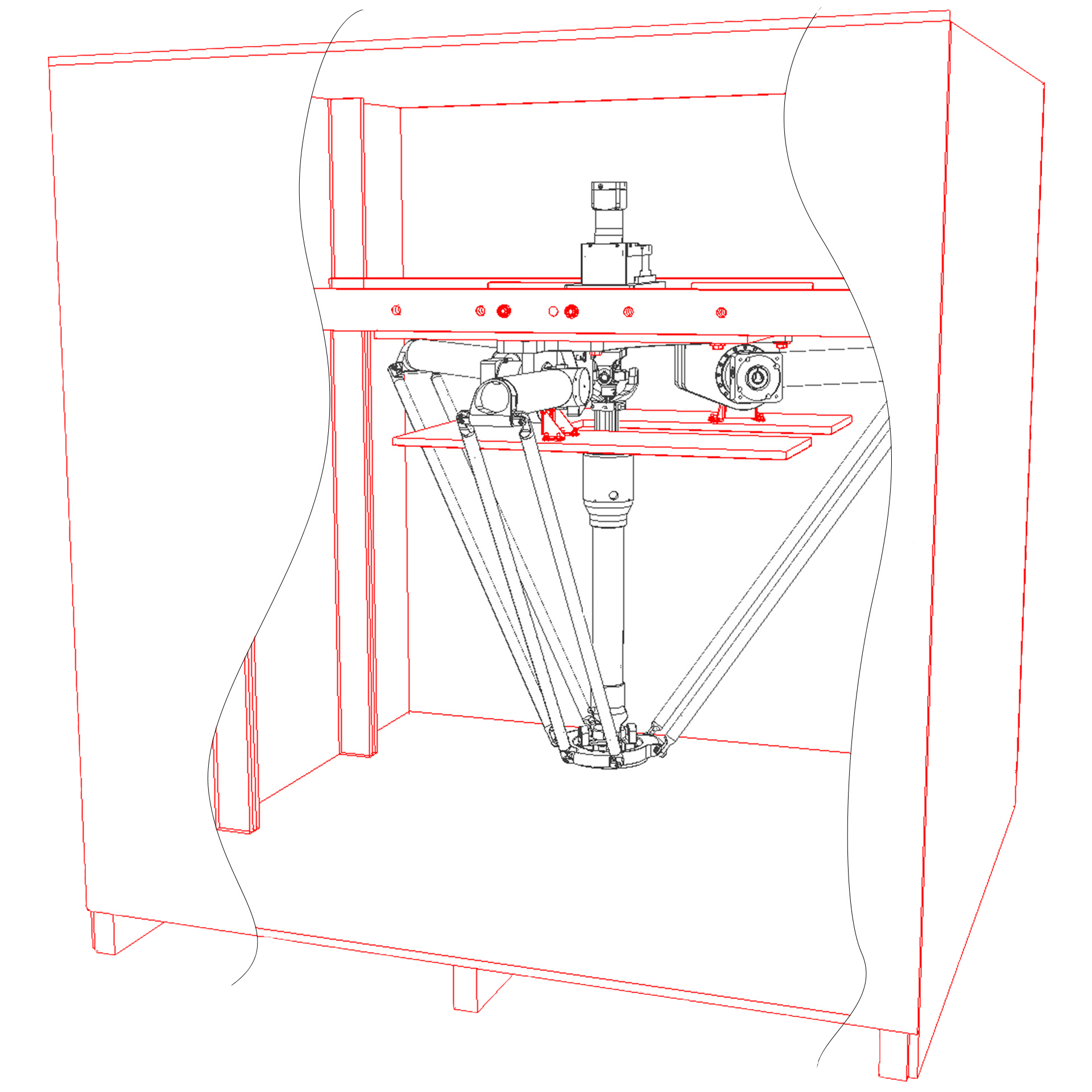
Dieser Robotertyp basiert auf dem Prinzip der parallelen Kinematik.
Alle Antriebe sind ortsfest am Roboterkopf montiert. Motorkabel werden nicht bewegt. Der Roboter hat drei (3) translatorische Freiheitsgrade.
Lieferumfang
- Robotermechanik inkl. Getriebe
- Servomotor-Adapter
- Gewinde-Schutzkappen
- Transport- und Verpackungsanleitung
Hinweis: Die Betriebsanleitung und Dokumentation zur Inbetriebnahme, Service, Wartung, usw. erhalten Sie im passwortgeschützten Download-Bereich der jeweiligen Produktseite (www.autonoxfinder.com).
-
Registriert bzw. angemeldet erhalten Sie weitere Dokumente:
Hinweis: Sollte die Dokumentation im Download-Bereich noch nicht vollständig sein, bitten wir Sie um Kontaktaufnahme (info@autonox.com).
| Getriebe-Artikelnummern für diese Robotermechanik | ||
|---|---|---|
| Funktion | Artikelnummer | Dokument |
| Antrieb der Oberarme | MT_BGR00013366-xx | Betriebsanleitung Getriebe Typ 3 (PDF) |
| Antrieb der Teleskopwelle für die Werkzeugbetätigung T/TS1 | MT_BGR00011502-xx | Betriebsanleitung Getriebe Typ 1 (PDF) |
| Verwendungsbereich: | Standard (nicht hygienisch) |
|---|---|
| Kinematik: | Parallel |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 200 | 7.9 |
| Arbeitshöhe Mitte [mm|in]: | 386 | 15.2 |
| Abtriebsform der Werkzeugbetätigung: | Flansch (T) |
| Anzahl der Werkzeugbetätigungen (Teleskopwelle(n)): | 1 |
| Max. Drehmoment der Werkzeugbetätigung T/TS1 am Abtrieb [Nm|in.lbs]: | 5,5 | 48.7 |
| Nenndrehmoment der Werkzeugbetätigung T/TS1 am Abtrieb [Nm|in.lbs]: | 5,5 | 48.7 |
| Max. Drehzahl der Werkzeugbetätigung T/TS1 am Abtrieb [1/min]: | 500 |
| Nenndrehzahl der Werkzeugbetätigung T/TS1 am Abtrieb [1/min]: | 320 |
| Lagertyp der Teleskopwelle(n): | Wälzlager |
| Lagertyp der Armgelenke: | Wälzlager |
| Schmierstoffe der Getriebe: | Synthetisch |
| Reinigung: | Kein Hochdruck |
| Umgebungstemperatur [°C|°F]: | 0 bis +40 | +32 bis +104 |
| Relative Luftfeuchtigkeit [%]: | 95 (kondensationsfrei) |
| Einbaulage: | Boden, Decke, Wand (auf Anfrage), Winkel (auf Anfrage) |

Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | 8LSA36.DB060D200-3 |
| M2 | 8LSA36.DB060D200-3 |
| M3 | 8LSA36.DB060D200-3 |
| MT1 | 8LSA26.D9060D200-3 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | AM8042-0F21 |
| M2 | AM8042-0F21 |
| M3 | AM8042-0F21 |
| MT1 | AM8023-0E21 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| M2 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| M3 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| MT1 | MS2S03-B0BYN-IMHG1-NNDNN-NN |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| M2 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| M3 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| MT1 | DMS2-058-0012-60-B1xxG1-Q000-0 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| M2 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| M3 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| MT1 | MCS06C60-EKMP1-Axxx-xx6xxx-xxxx |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | VPL-B1003T-PK14AA |
| M2 | VPL-B1003T-PK14AA |
| M3 | VPL-B1003T-PK14AA |
| MT1 | VPL-B0633M-PK14AA |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| M2 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| M3 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| MT1 | CMP40M/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.800 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung 1) |
Hersteller-Artikelnummer (Empfehlung 2) | Hersteller-Artikelnummer (Empfehlung 3) |
|---|---|---|---|
| M1 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| M2 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| M3 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| MT1 | 1FK2203-4AK10-2MA0 | 1FK2203-4AK10-2MB0 | 1FK7022-5AK71-1LH5 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | SGM7A-10D7F2C |
| M2 | SGM7A-10D7F2C |
| M3 | SGM7A-10D7F2C |
| MT1 | SGM7A-04D7F2C |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.

Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))



Diese Transportkiste wird zum Transport der Robotermechanik benötigt. Sie kann für den Versand per Landverkehr, Luft- und Seefracht verwendet werden.
- Transportkiste inkl. Montage-/Transporthilfe
- Getriebesperren
Dieser Robotertyp basiert auf dem Prinzip der parallelen Kinematik.
Alle Antriebe sind ortsfest am Roboterkopf montiert. Motorkabel werden nicht bewegt. Der Roboter hat drei (3) translatorische Freiheitsgrade.
Lieferumfang
- Robotermechanik inkl. Getriebe
- Servomotor-Adapter
- Gewinde-Schutzkappen
- Transport- und Verpackungsanleitung
Hinweis: Die Betriebsanleitung und Dokumentation zur Inbetriebnahme, Service, Wartung, usw. erhalten Sie im passwortgeschützten Download-Bereich der jeweiligen Produktseite (www.autonoxfinder.com).
| Verwendungsbereich: | Standard (nicht hygienisch) |
|---|---|
| Kinematik: | Parallel |
| Translatorische Freiheitsgrade (X,Y,Z): | 3 |
| Rotatorische Freiheitsgrade (α,ß,γ): | 0 |
| Nenntraglast [kg|lbs]: | 3 | 6.6 |
| Arbeitsbereichs-Durchmesser [mm|in]: | 1200 | 47.2 |
| Arbeitshöhe außen [mm|in]: | 200 | 7.9 |
| Arbeitshöhe Mitte [mm|in]: | 386 | 15.2 |
| Abtriebsform der Werkzeugbetätigung: | Flansch (T) |
| Anzahl der Werkzeugbetätigungen (Teleskopwelle(n)): | 1 |
| Max. Drehmoment der Werkzeugbetätigung T/TS1 am Abtrieb [Nm|in.lbs]: | 5,5 | 48.7 |
| Nenndrehmoment der Werkzeugbetätigung T/TS1 am Abtrieb [Nm|in.lbs]: | 5,5 | 48.7 |
| Max. Drehzahl der Werkzeugbetätigung T/TS1 am Abtrieb [1/min]: | 500 |
| Nenndrehzahl der Werkzeugbetätigung T/TS1 am Abtrieb [1/min]: | 320 |
| Lagertyp der Teleskopwelle(n): | Wälzlager |
| Lagertyp der Armgelenke: | Wälzlager |
| Schmierstoffe der Getriebe: | Synthetisch |
| Reinigung: | Kein Hochdruck |
| Umgebungstemperatur [°C|°F]: | 0 bis +40 | +32 bis +104 |
| Relative Luftfeuchtigkeit [%]: | 95 (kondensationsfrei) |
| Einbaulage: | Boden, Decke, Wand (auf Anfrage), Winkel (auf Anfrage) |
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | 8LSA36.DB060D200-3 |
| M2 | 8LSA36.DB060D200-3 |
| M3 | 8LSA36.DB060D200-3 |
| MT1 | 8LSA26.D9060D200-3 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | AM8042-0F21 |
| M2 | AM8042-0F21 |
| M3 | AM8042-0F21 |
| MT1 | AM8023-0E21 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| M2 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| M3 | MS2S05-B0BTN-IMHG1-NNDNN-NN |
| MT1 | MS2S03-B0BYN-IMHG1-NNDNN-NN |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| M2 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| M3 | DMS2-091-0035-60-B1xxG1-Q000-0 |
| MT1 | DMS2-058-0012-60-B1xxG1-Q000-0 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| M2 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| M3 | MCS09D60-EKMP1-Axxx-xx6xxx-xxxx |
| MT1 | MCS06C60-EKMP1-Axxx-xx6xxx-xxxx |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | VPL-B1003T-PK14AA |
| M2 | VPL-B1003T-PK14AA |
| M3 | VPL-B1003T-PK14AA |
| MT1 | VPL-B0633M-PK14AA |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| M2 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| M3 | CMP63S/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.100 |
| MT1 | CMP40M/BK/PK/AK0H/SB1 / Mat-Nr. 84207209.800 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung 1) |
Hersteller-Artikelnummer (Empfehlung 2) | Hersteller-Artikelnummer (Empfehlung 3) |
|---|---|---|---|
| M1 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| M2 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| M3 | 1FK2105-4AF11-0MA0 | 1FK2105-4AF11-0MB0 | 1FK7042-2AK71-1RH2 |
| MT1 | 1FK2203-4AK10-2MA0 | 1FK2203-4AK10-2MB0 | 1FK7022-5AK71-1LH5 |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
Motor |
Hersteller-Artikelnummer (Empfehlung) |
|---|---|
| M1 | SGM7A-10D7F2C |
| M2 | SGM7A-10D7F2C |
| M3 | SGM7A-10D7F2C |
| MT1 | SGM7A-04D7F2C |
Für die ausreichende Dimensionierung der Antriebe in Bezug auf die kundenspezifische Anwendung übernimmt autonox Robotics keine Haftung. Auf Wunsch können von o.g. Motorempfehlungen abweichende Motortypen eingesetzt werden. Allerdings muss die mechanische Kompatibilität durch autonox geprüft und bestätigt werden. Die zu verwendenden Motortypen müssen in jedem Fall vor der Bestellung gemeinsam vereinbart sein. Die Motoren sind nicht im Lieferumfang von autonox Robotics enthalten.
-
Registriert bzw. angemeldet erhalten Sie weitere Dokumente:
Hinweis: Sollte die Dokumentation im Download-Bereich noch nicht vollständig sein, bitten wir Sie um Kontaktaufnahme (info@autonox.com).
| Getriebe-Artikelnummern für diese Robotermechanik | ||
|---|---|---|
| Funktion | Artikelnummer | Dokument |
| Antrieb der Oberarme | MT_BGR00013366-xx | Betriebsanleitung Getriebe Typ 3 (PDF) |
| Antrieb der Teleskopwelle für die Werkzeugbetätigung T/TS1 | MT_BGR00011502-xx | Betriebsanleitung Getriebe Typ 1 (PDF) |
Diese Vorrichtung dient zur Kalibrierung unserer Robotermechaniken. Dabei wird der jeweiligen mechanischen Achsstellung eine definierte Motorstellung (Drehgeber-Wert) zugeordnet. Die Kalibrier-Anleitungen finden sie im Download-Bereich der jeweiligen Robotermechanik.
- Kalibriervorrichtung
- Befestigungssatz (bestehend aus: Schraube(n) und/oder Stift(en))
Diese Transportkiste wird zum Transport der Robotermechanik benötigt. Sie kann für den Versand per Landverkehr, Luft- und Seefracht verwendet werden.
- Transportkiste inkl. Montage-/Transporthilfe
- Getriebesperren